

























60
This will run the sample motions for KXR. If the robot keeps falling or does not move
properly, try trimming the servos again.
The following uses "Hello̲KXR-L4D(Vxx.x)" as an example. Please refer to "Trim
Adjustment" section if necessary.
■
Running Sample Motions
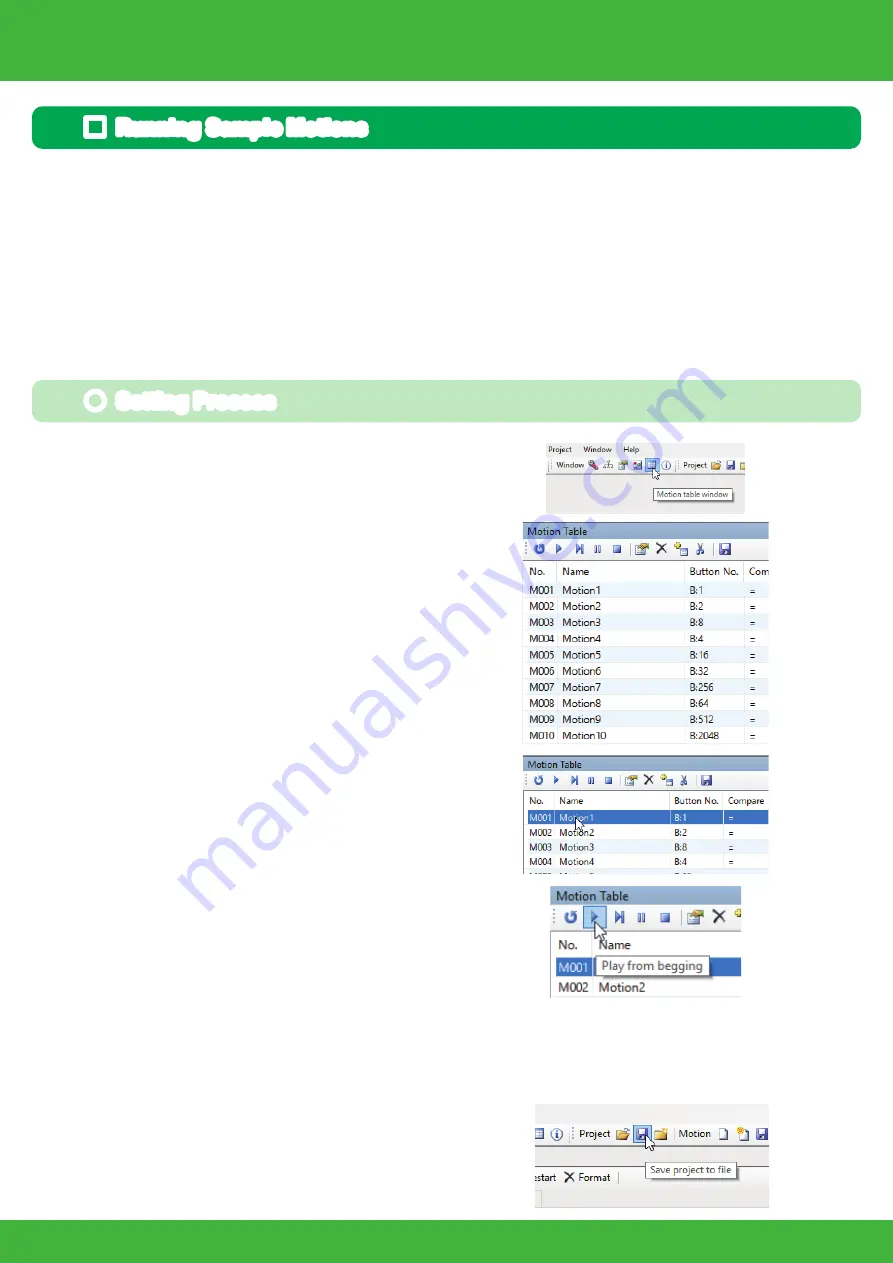
1. Press the "Motion List Window" button
in the toolbar in the Main Window.
If it is already displayed, you do not
need to press the button.
2.
In the Motion List, click the motion name you
wish to play.
●
Setting Process
3.
Press the Play button in the Motion List
window.
The robot will actually start
moving as soon as the Play button is
pressed, so please be careful.
4. Save Project before quitting the soft-
ware. Press the "Save Project" button
in the toolbar of the Main Window.
To play other motions, repeat steps 2 to 3.
If you wish to stop the robot during a motion, press the Stop button.
In reduced voltage motion, servos are depowered. To return them to normal,
turn the robot off and back on.
In the sample project, settings are enabled so that the reduced voltage motion will run
automatically. If the battery runs low, other than the reduced voltage motion, the robot
may move in unintended ways, lose power or otherwise operate abnormally.
First, charge (or replace) the battery.
(When using a LiFe battery and creating a new project, always enable the Reduced
voltage motion setting.)
5.
When saving is completed, the following
dialog appears so press "OK".
Motions can also be run through "KRC Commander". Select "KRC Command-
er" from "Window" menu. The motion assigned to the button data is sent to
the robot by pressing the button shown in the window. For detailed instruc-
tions, please refer to "HeartToHeart4 User's Manual".
* For usage details, refer to the HeartToHeart4 User s Manual.
* Use button assignments as they are with wireless control on KRC-5FH.
● Try Running a Motion with KRC Commander
Running Sample Motions 1







































































