





























D3-DA 3xx/x
Safety functions
Project engineering manual V1.07
79
© KEBA
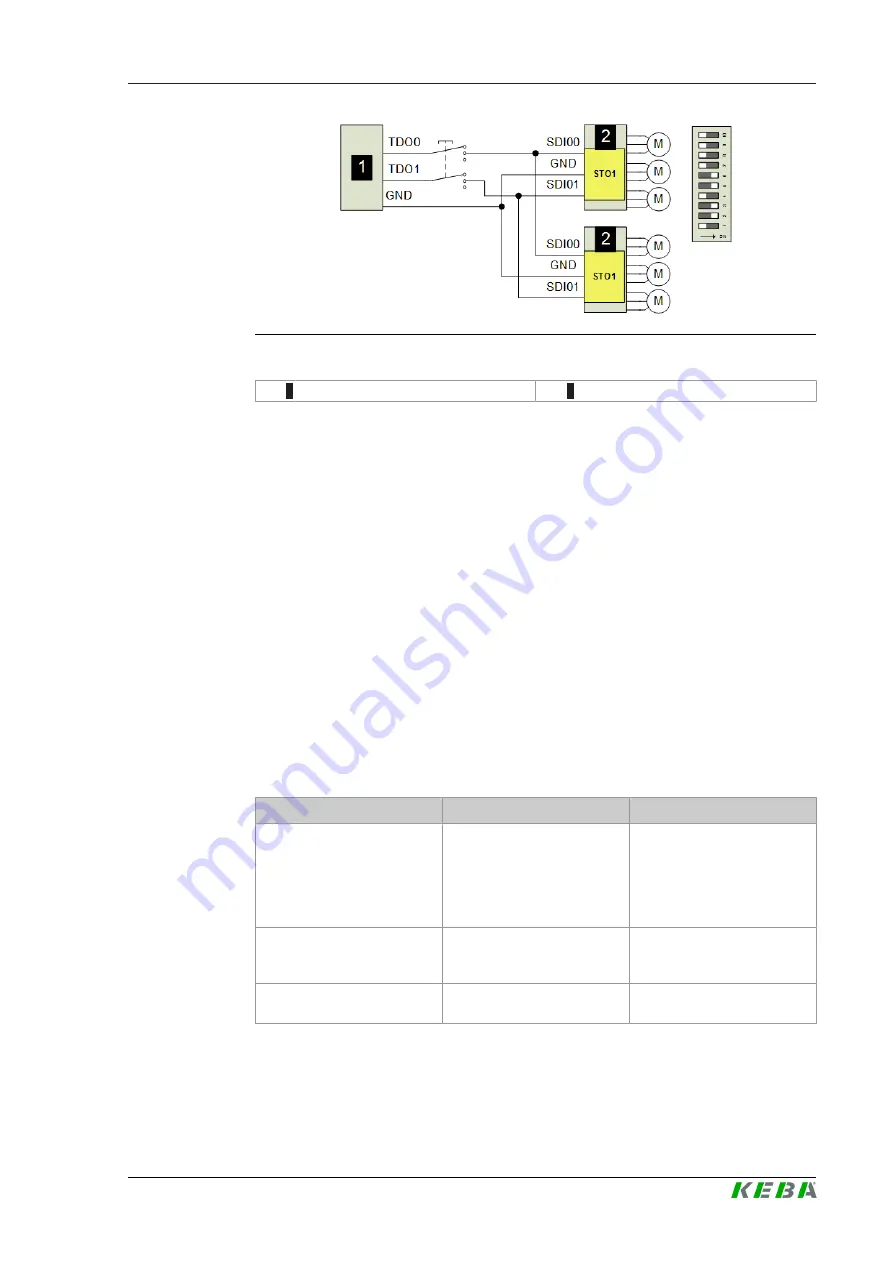
Fig. 8-47: STO control dircet via supply module
1
... D3-DP 3xx/x
2
... D3-DA 3xx/x
8.5
Validation of safety functions
It is recommended to define always a validation plan. In the plan the tests
and analyses used to demonstrate the compliance of the solution with the
requirements from the application are defined.
8.6
Validation of STO safety function
The safety function STO is to be validated against the safety requirements
from the application in the following cases:
●
During commissioning
●
After changes of the application
●
After repair or device replacement
The following table shows the test steps to be undertaken. The table has to
be worked through from top to bottom.
Designation
State/Event
Expected result
Initial state
●
System is switched on
●
Torque is enabled (STO
input is "active").
●
Axis module generates
torque.
Motor axis is actively in mo-
tion or torque is present.
Test step 1
STO input becomes "inac-
tive".
Motor axis coasts down or
there is no torque and no er-
ror message occurs.
Test step 2
STO input becomes "active".
Axis module can apply
torque.







































































