
























10
JVL Industri Elektronik A/S - User Manual - Integrated Stepper Motors MIS17x, 23x, 34x, 43x
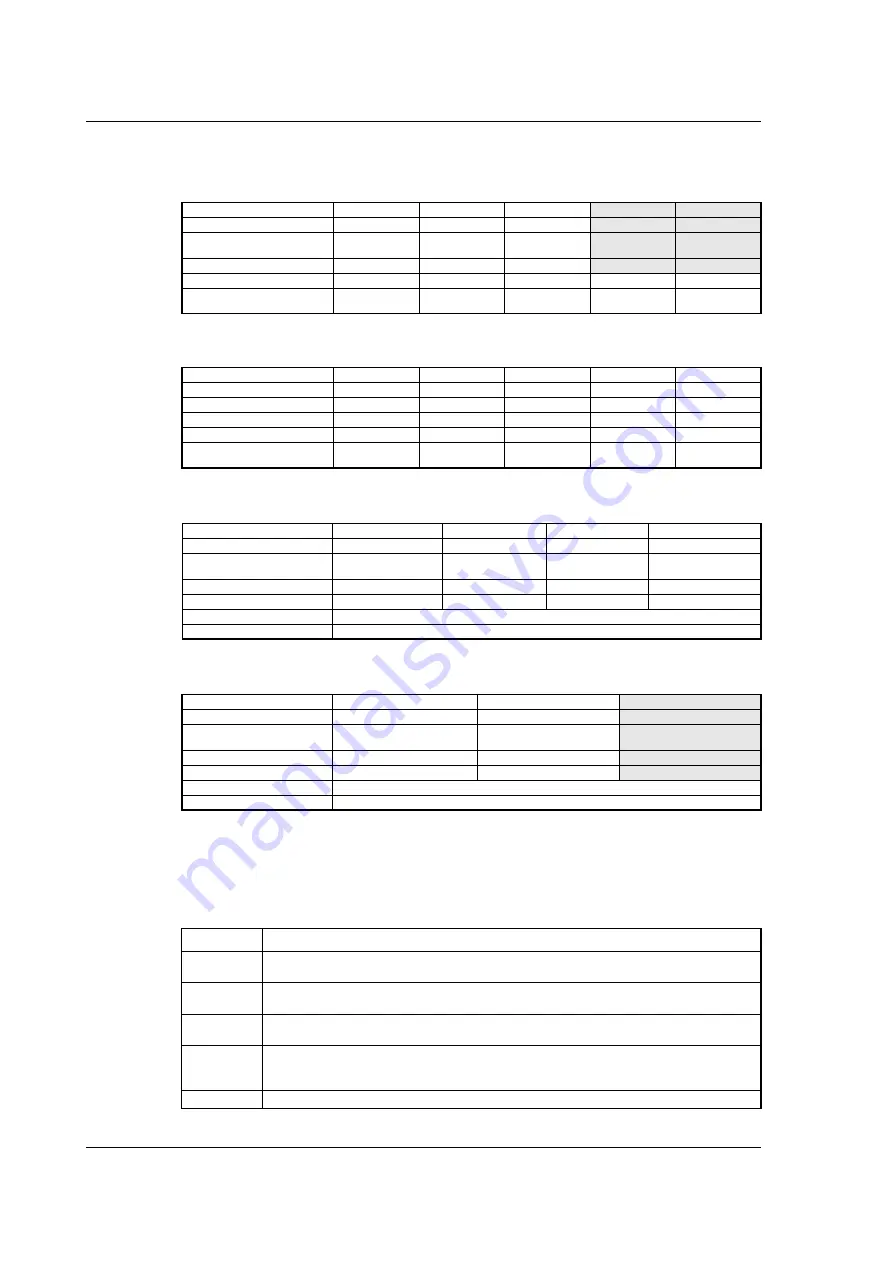
Below are more detailed specification of the individual motors in each motor size.
1.2.1
MIS17x - NEMA17 flange
1.2.2
MIS23x - NEMA23 flange
1.2.3
MIS34x - NEMA34 flange
1.2.4
MIS43x - NEMA43 flange
Concerning info for the
MILxxx (linear)
motors please consult your nearest JVL repre-
sentative.
1.2.5
Basic modes/functions in the QuickStep motor
The QuickStep motor offers the following functions:
Motor type:
MIS171S/Q
MIS173S/Q
MIS176S/Q
Holding torque Nm [Oz-In]
0.36 [50.9]
0.56 [79.3]
0.80 [113.3]
Inertia kgcm² [Oz-In-Sec²]
0.020 /
[0.000283]
0.054 /
[0.000793]
0.102 /
[0.00144]
Weight - kg [lb]
0.54 [1.19]
0.68 [1.5]
0.9 [1.99]
Max. axial shaft force N
-
-
-
Max. radial shaft force (N)
(applied 20 mm from flange)
-
-
-
Motor type:
MIS231S/Q
MIS231T/R
MIS232S/Q
MIS232T/R
MIS234S/Q
Holding torque Nm [Oz-In]
0.97 [137.4]
1.16 [164.3]
1.97 [279.0]
2.53 [358.3]
3.08 [436.2]
Inertia kgcm² [Oz-In-Sec²]
0.3 [0.00423]
0.3 [0.00423]
0.48 [0.00677]
0.48 [0.00677]
0.65 [0.0092]
Weight - kg [lb]
1.1 [2.43]
1.1 [2.43]
1.4 [3.09]
1.4 [3.09]
2.0 [4.41]
Max. axial shaft force N
15
15
15
15
15
Max. radial shaft force (N)
(applied 20 mm from flange)
75
75
75
75
75
Motor type:
MIS340
MIS341
MIS342
MIS343
Holding torque - Nm [Oz-In]
2.0 [282]
4 [575]
6.0 [849]
8.0 [1151]
Low speed torque - 1 RPM
- Nm [Oz-In]
3.0 [424]
6.1 [863]
9.0 [1274]
12.0 [1727]
Inertia - kgcm² [Oz-In-Sec²]
1.4 [0.0198]
2.7 [0.0381]
4.0 [0.0564]
4.0 [0.0564]
Weight - kg [lb]
2.05 [4.52]
3.13 [6.9]
4.2 [9.26]
4.5 [10.71]
Max. axial shaft force
115N
Max. radial shaft force
180N applied 12.5mm from shaft end
Motor type:
MIS430
MIS432
Holding torque - Nm [Oz-In]
6.7 [944]
16.7 [2360]
Low speed torque - 1 RPM
Nm [Oz-In]
10.0 [1416]
25.0 [3540]
Inertia - kgcm² [Oz-In-Sec²]
5.5 [0.0779]
16.2 [0.229]
Weight - kg [lb]
5.5 [12.13]
12.2 [26.9]
Max. axial shaft force
80 N
Max. radial shaft force
At 5mm max 640N, At 10mm max 425 N, At 15mm max 320N, At 20mm max 240N
Mode
Description
Passive
The motor will be in a completely passive state but communication is active and internal
registers can be setup. Motor shaft can be turned by hand.
Velocity
The motor velocity can be controlled using MacTalk software or by setting register 5
(V_SOLL) using serial or program commands.
Position
The motor position can be controlled using MacTalk or by setting register 3 (P_SOLL) using
serial or program commands.
Gear
The motor position and velocity can be controlled by pulse and direction or encoder signals
at the inputs “IN1” and “IN2”.The gear ratio can be set to a large ratio by using register 14
(GEAR1) and register 15 (GEAR2).
CSP Mode
Cyclic Synchronous Position mode (Ethernet only)
Summary of Contents for MIS17 Series
Page 56: ...56 JVL Industri Elektronik A S User Manual Integrated Stepper Motors MIS17x 23x 34x 43x ...
Page 76: ...76 JVL Industri Elektronik A S User Manual Integrated Stepper Motors MIS17x 23x 34x 43x ...
Page 266: ...266 JVL Industri Elektronik A S User Manual Integrated Stepper Motors MIS17x 23x 34x 43x ...
Page 318: ...318 JVL Industri Elektronik A S User Manual Integrated Stepper Motors MIS17x 23x 34x 43x ...







































































