

























MH860 series hydraulic servo drive
Product overview
6
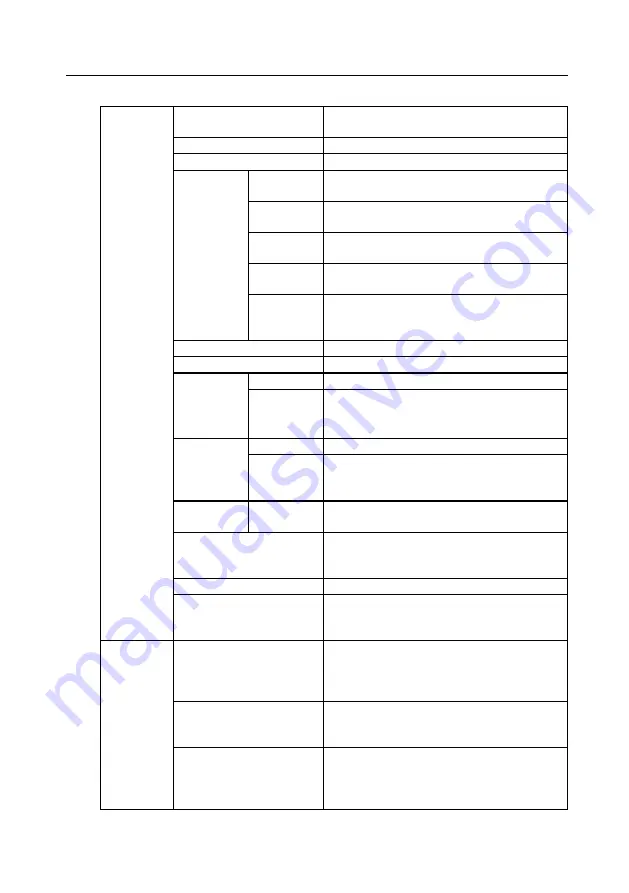
2.5 Drive technical performance
Basic
specifications
Control mode
Three-phase full-wave rectification, IGBT with
PWM control on sine wave current drive
Max. output frequency
400Hz
Motor position sensor
Resolver resolution: 4096pluse/rev
Environment
Working
temperature
-10°C
– +50°C (No freezing. Derating is required
if the temperature exceeds 40°C.)
Storage
temperature
-30°C
– +60°C (No freezing)
Relative
humidity (RH)
Working/storage RH ≤ 90% (no condensation)
Air
Indoor (no sunlight, corrosive gas, combustible
gas, oil mist, or dust)
Altitude
Below 3000m (Derating is needed when the
altitude exceeds 1000m. Derate by 1% for every
increase of 100m.)
Ingress protection (IP) rating IP20
Cooling method
(1) Air cooling. (2) Liquid cooling
Digital signal
Input
Six inputs. For details, see section 4.7.
Output
Four outputs. For details, see section 4.7.
Analog signal
Input
Three inputs, 12-bit A/D, 0
–10V
Output
Two outputs, 10-bit D/A, 0
–10V (internal
parameter output can be set through the LED
panel or external HMI)
Power supply
Output
Used to externally provide 15V reference power
supply. Max. output current: 50mA
Communication
Function
Four types of filed bus available:
(Standard) Modbus
(Optional) EtherCAT, CANopen, and PROFINET
LED panel and keypad
Six-digit display, with four function keys
External HMI
The external HMI communicates with the drive
through the RS485 interface to set parameters,
copy parameters, and so on.
Control
function
performance
Process control
Supported input: analog input, internal input,
communication input, RS485 continuous input,
CANopen input, EtherCAT input, and
PROFINET input
Speed control
Supported control methods: CAN
communication, RS485 communication,
CANopen input, and EtherCAT input
Multi-pump parallel control
Able to control 16 pumps in five working modes
(multi-pump, hybrid, multi-mode, communication
with two models, and communication with four
models)







































































