


























41
XtrapulsCD1-a
Chapter 6 - Commissioning
3.5 - SPEED LOOP ADJUSTMENT WITH VERTICAL LOAD
Start the
Auto-tuning
procedure with the
motor uncoupled from its mechanical load
in order to initialize the
speed loop gains. Select the
limiting
mode of the I
2
t function (see chapter 8, section 3.2). Then select the speed
regulator (
PI
or
PI
2
). Couple the motor to the load again and move the shaft by means of the digital speed input
command until its stall position where
the shaft rotation over one revolution is not dangerous for operator
and machine
.
Then execute the
Auto-tuning
command with the motor
enabled at its stall position
(zero speed input
command). In case of loud noise in the motor at standstill and when running, check the rigidity of the transmission
between motor and load (backlashes and elasticities in gears and couplings). If necessary, start the
Auto-tuning
procedure while selecting a
lower
bandwidth. If the problem remains, renew the
Auto-tuning
while activating the
antiresonance filter
.
3.6 - DRIVE PARAMETERS SAVING
Save all parameters in the drive EEPROM by means of the function
Save parameters to EEPROM
.
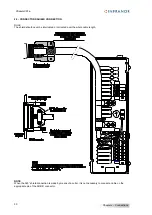
3.7 - MOTOR PHASING AT POWER UP
In the
Incremental encoder
configuration
without HES
, the motor
Phasing
procedure must be executed
according to the following diagram at each drive power up:
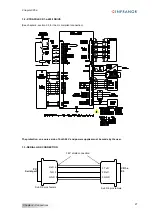
The analog output on the X3 connector can be configured in the
Setup
menu of the
VISUAL DRIVE SETUP
software in order to get the
Phasing OK
output signal (output voltage from 0 V to 10 V when the motor phasing is
OK).
Remark
:
In the
Incremental encoder
configuration
without HES
, the motor
Phasing
procedure must be carried
out again after a
Feedback
fault release or a
Counting
fault release. The motor
Phasing
procedure must also be
carried out again after the modification of the motor or the encoder parameter value.
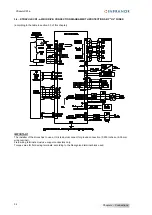
AOK
Power On
ENABLE
CV0
PHASING OK
Power up
Ready
Phasing
Stopped
running
Start phasing
Start running
End power up
End phasing
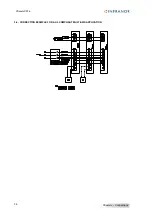
In the case of an axis with unbalanced load (constant torque due to the gravity effect on a vertical
axis), the
incremental encoder
configuration
without HES
is not valid because the motor phasing
procedure at power up cannot be executed.
!
In the case of an axis with unbalanced load (constant torque due to the gravity effect on a
vertical axis), the motor phasing procedure is not valid. The motor must be equipped with an
incremental e HES or an absolute Sin/Cos encoder.
!





















































