mobileIoT gateway
CR3158
7
Restart the device to update to the newly configured mode.
When bit 7 is written, the device restarts.
4.3.1 Real-time mode
In real-time mode, bidirectional transmission of CAN messages occurs.
The unit can send/receive process data (e.g. machine parameters) via CAN interfaces during
operation via Bluetooth/WLAN, the mobile network and the
mobile
IoT platform. Depending on the
design, it can transmit data from the GNSS receiver and the input/output functions and forward them
via the CAN bus. Alternatively, the unit can receive the data from an external receiver (e.g.
CANwireless) via a WLAN or Bluetooth connection and send it to the
mobile
IoT platform.
The data is continuously transmitted and can be evaluated in near real-time. For this function, there
must be a permanent connection between the unit and the user software or the
mobile
IoT platform.
This mode also supports a real-time connection from Codesys 2.3. This requires appropriate software
and a
mobile
IoT data contract.
The real-time mode can be set locally via an SDO or via the
mobile
IoT suite in the machine properties.
In real-time mode, no data or messages are stored on the
mobile
IoT platform.
4.3.2 Cloud logging mode
The cloud logging mode allows GNSS position data to be sent automatically to the mobileIoT platform.
In this mode, metrics can be actively generated and sent by the application controller and also allow
the gateway to autonomously log data available on the CAN bus.
Data linking to the application controller is configured in the mobileIoT suite. There the corresponding
source code will be automatically generated, which can be loaded into the controller programme.
No data is sent to the mobileIoT platform during real-time connection. As soon as the real-time
connection is terminated, data is captured again and sent to the mobileIoT platform.
4.4 Input/output functions
The device has additional input/output functions (3 analogue inputs, 1 digital output). For example, the
input function can be used to collect device or machine status information or to directly detect and
monitor switch states. The data determined via the input/output functions can be visualised or
transferred via the CAN bus.
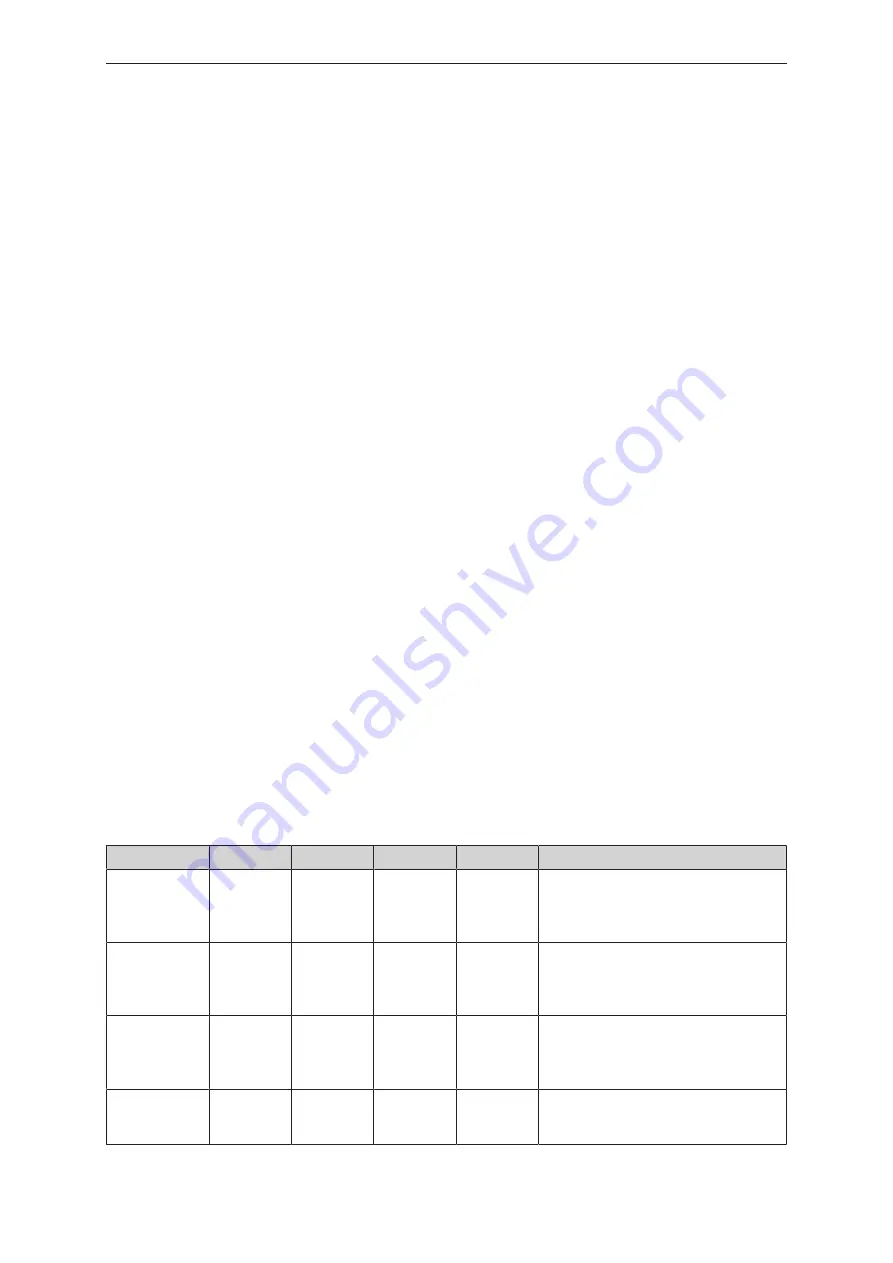
The input/output functions are accessed via the following objects:
Object
Index
Subindex
Type
Default
Description
Analogue input 1
0x546F
0x14
R32
ro
—
Pin 4 of the 14-pin Micro Timer II connector
Raw value of the analogue input measure-
ment (Volt)
No filtering applied
Analogue input 2
0x546F
0x15
R32
ro
—
Pin 5 of the 14-pin Micro Timer II connector
Raw value of the analogue input measure-
ment (Volt)
No filtering applied
Analogue input 3
0x546F
0x16
R32
ro
—
Pin 6 of the 14-pin Micro Timer II connector
Raw value of the analogue input measure-
ment (Volt)
No filtering applied
IO – clamp 30
voltage
0x3333
0x67
R32
ro
—
Terminal 30
Raw value of the analogue input measure-
ment (Volt)