









R7195A,B MOTOR POSITIONER
63-2582
6
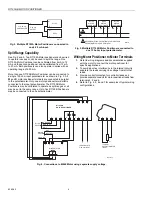
Fig. 7. Connections to M944B,E Modutrol® Motors.
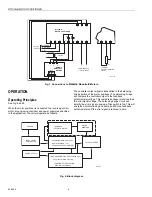
OPERATION
Operating Principles
See Fig. 8 and 9.
When the motor positioner is connected to a reversing control
motor, proportioning controller, and power supply (as specified
in the application), the unit will operate as follows:
The controller output signal is transmitted to the balancing
bridge portion of the motor positioner. The balancing bridge
will compare the controller output to the feedback
potentiometer voltage. This compared voltage is referred to as
the error signal voltage. The balancing bridge circuit will
amplify the error signal, causing a Triac switch to fire. This will
energize a motor winding and will re-position the feedback
potentiometer until the error signal is reduced to zero.
Fig. 8. Block diagram.
R7195A,B
MOTOR POSITIONER
5
4
6
G
L2
L1
2
3
1
B
W
R
1
2
3
L1
L2
24 VAC
120 VAC
Y
T
G
GROUND
NEUTRAL
HOT
R7195
SUPPLY
M944B, E
MODUTROL
MOTORS
TERMINALS TO
4-20 mA INPUT
B
W
R
CW
135-OHM
POTENTIOMETER
INPUT
M20792
+
–
SENSOR
FEEDBACK
POTENTIOMETER
MOTOR
WINDINGS
INPUT FROM
CONTROLLER
BALANCING BRIDGE CIRCUIT
(COMPARES INPUT TO
FEEDBACK POTENTIOMETER)
TRIAC SWITCHES
POWER SUPPLY
ZERO CROSSING CIRCUITS (220/240 VAC)
OPTO ISOLATORS (120 VAC)
(PROVIDE RFI PROTECTION;
ALSO DRIVES TRIACS)
M20793
Summary of Contents for R7195A
Page 11: ...11 63 2582 ...

























































