





























2. Wiring and connection
2-22
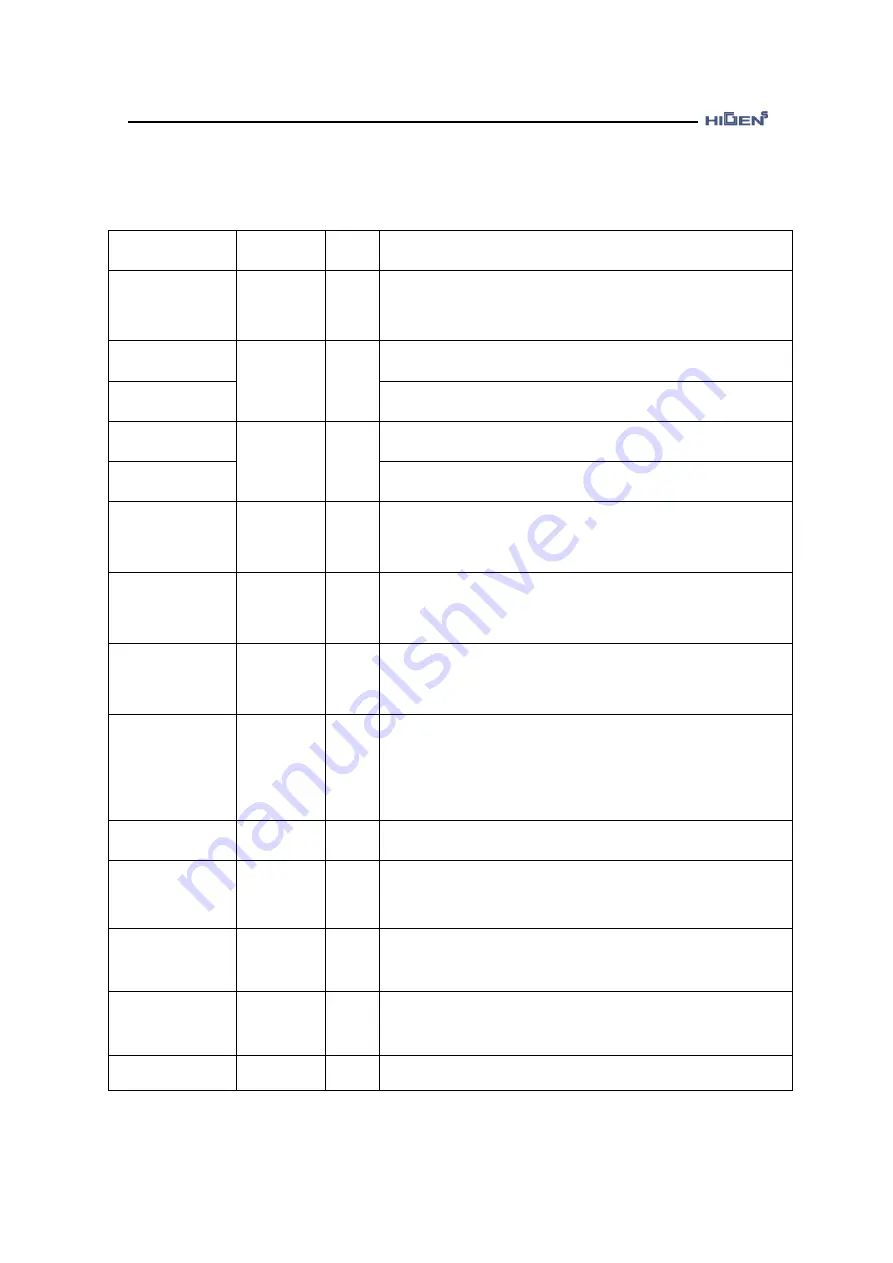
2.5.5. Fixed I/O signal function table
Signal content
Name
Pin
no.
Function and usage explanation
F+ input pulse
F- input pulse
R+ input pulse
R- input pulse
PPFIN
PFIN
PPRIN
PRIN
11
10
9
12
Depending on the set value of pulse logic, it receives and
operates according to the specific position command type
of negative or positive logic. Refer to Chapter 3 for details
of the pulse type.
Analog
speed
command
SPDIN
27
When operating in speed mode, enter the analog speed
command.
Analog
speed
limit
When operating in torque mode, enter the analog speed
limit.
Analog torque
command
TRQIN
28
When operating in torque mode, enter the analog torque
command.
Analog torque
limit
When operating in speed mode, enter the torque limit.
Monitor output 1
MONIT1
3
Designated variable value is outputted in 0~
5[V] range
through the DA converter.
[Monitor selection] 0: Speed, 1: Speed command, 2: Torque,
3: Torque command, 4: Pulse, 5: Command pulse
Monitor output 2
MONIT2
2
Designated variable value is outputted in 0~
5[V] range
through the DA converter.
[Monitor selection] 0: Speed, 1: Speed command, 2: Torque,
3: Torque command, 4: Pulse, 5: Command pulse
Encoder output
PAO,/PAO
PBO,/PBO
PZO,/PZO
7,32
6,31
5,30
After dividing the motor encoder signal from CN2 as much
as the division rate set in the division setting menu, it
outputs in line drive method.
+24[V]
Power input
+24VIN
49
As the external I/O contact point power, enter
+24[VDC]
10% 1.0[A] or above for the external power.
(User preparation)
◆
When using the I/O contact point power simultaneously,
recalculate the power capacity according to the output
contact points.
+24[V] GND
GND24
24
25
Connect the ground of power+24[VDC]
10% for external
I/O contact point. (User preparation)
0[V]
GND
1,8
26,33
34,36
Common power ground terminal of speed, command,
torque limit command, speed, torque monitor output,
encoder output terminal.
B
Battery -
BAT+
BAT-
29
4
When using the absolute encoder, connect the battery from
the host controller. Do not connect the drive side and both
sides of the host controller.
+12[V] output
-12[V] output
+12
-12
35
37
When simply outputting speed command and torque limit,
use the
12[V] power.
FRAME
GROUND
FG
50
Ground the cable ground wire of CN1.
♥ Function of fixed I/O contact point cannot be changed.
Summary of Contents for FDA7000 Series
Page 42: ...1 Model check and handling 1 35...
Page 57: ...2 Wiring and connection 2 14 Drawing C Order Code Please contact our sales office...
Page 130: ...3 Parameter setting 3 51...
Page 167: ...5 Servo operating 5 10...
Page 188: ...8 External view 8 2 External view B CN1 CN3 CN2 External view C...
Page 189: ...8 External view 8 3 External view D External view E...
Page 190: ...8 External view 8 4 External view F External view G...
Page 192: ...8 External view 8 6 External view I External view J...
Page 193: ...8 External view 8 7 External view K External view L...
Page 194: ...8 External view 8 8 External view M...
Page 195: ...8 External view 8 9...







































































