


















6. EtherCAT Object Dictionary
Config Internal Limit Active bit
This object can change how to operate Status word - bit 11: Internal Limit Active. If the value is set to 1,
the Internal Limit Active bit also displays the H/W Limit Switch status.
Enable Packet Delay Compensation
In Cyclic Synchronous Position Mode, the EtherCAT master sends the position to which the drive should
go in every cycle, and the drive moves to the position in the DC Sync Event. If the EtherCAT master
sends the packet later than the DC Sync Event, the drive received the position information to go in this
cycle in the next cycle. This causes the motor to repeat the action of stopping for a short time and moving
at double speed. That is, the vibration of the motor occurs due to the delay of the packet.
’Enable Packet Delay Compensation’ object is a function to reduce the vibration of the motor when the
packet sent by the EtherCAT master is delayed in Cyclic Synchronous Position Mode. If the value is set
to 1, the ’Enable Packet Delay Compensation’ function is enabled.
Information
This object is supported on devices with Software version (100Ah) 02.03.48 or higher.
Transit to Fault state when Safety activated
This object can be set to notify as an alarm when the Safety function is activated. If the value is set to
1, an alarm (Error Code FF45h) occurs when Safety function is activated by turning the TQOFF inputs
OFF.
This error can be cleared with the Fault reset command.
Information
This object is supported on devices with Software version (100Ah) 02.02.51 or higher.
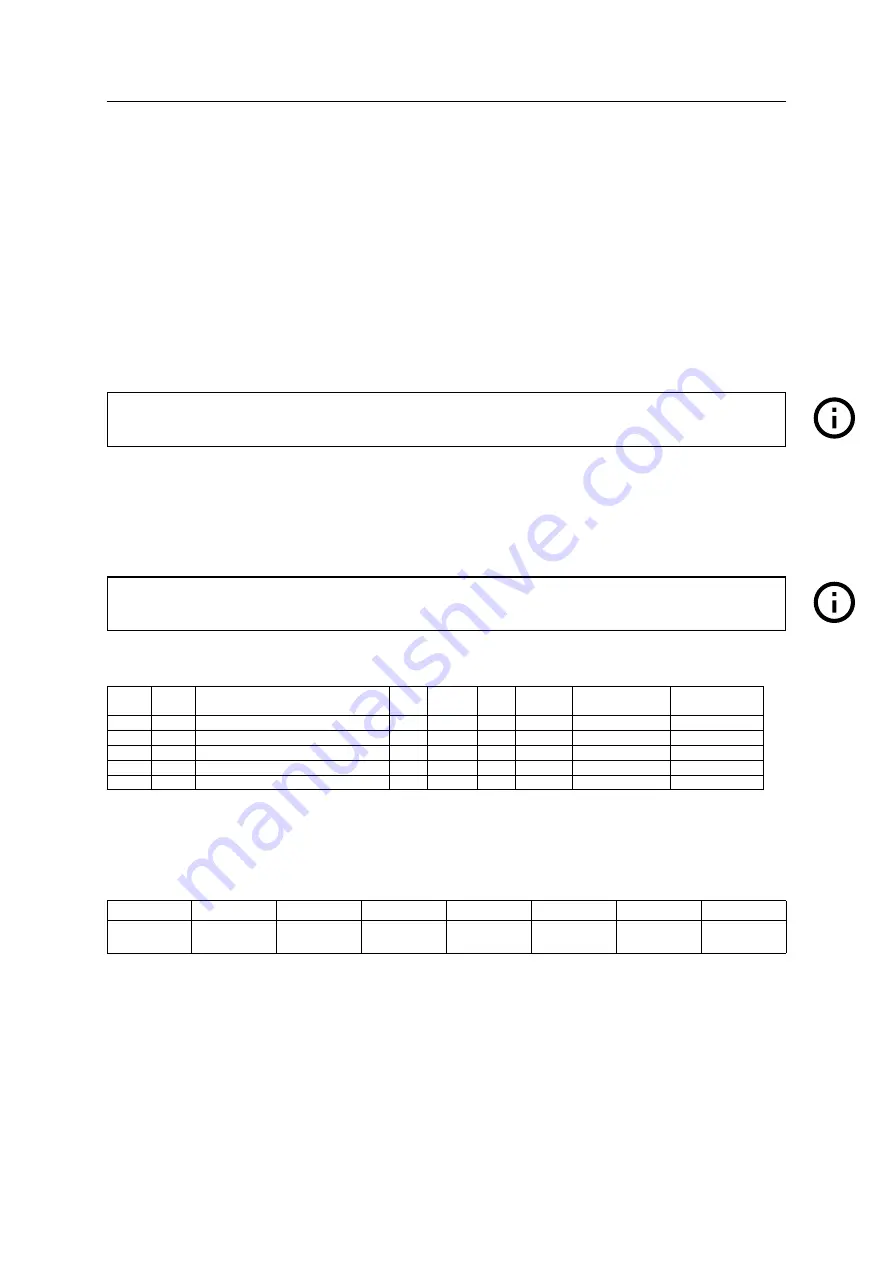
6.6.20
Object 2040h: Safety Mode
Sub
PDO
Value
Default
Index
index
Name
Type
Access
SAVE
Mapping
Range
Value
2040h
0
Number of entries
U8
RO
No
No
4
1
Safety Status
U8
RO
No
No
0
2
Control Safety Input
U8
RW
Yes
No
0
∼
2
0
3
Control Safety Output
U8
RW
Yes
No
0
∼
1
0
4
Safety IO Logics
U8
RW
Yes
No
00h
This object set the Safety Function and indicates the status.
Safety Status
This object indicates the status of Safety Function.
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
-
-
TQOFF2
TQOFF1
-
Acknowledge
Request
Input Status
Enable
Table 6.42: Safety Status
Bit 0 - Enable: Safety Function is ready. It indicates that the value of Control Safety Input is set to a value
other than 0, so that Digital In1, Digital In2 input signals are operate as TQOFF Input.
Bit 1 - Inputs Status: Some inputs assigned as TQOFF Input are ON. Inputs Status is ON when TQOFF1
or TQOFF2 is ON. Inputs Status is OFF when TQOFF1 and TQOFF2 are OFF.
Bit 2 - Acknowledge Request: TQOFF Inputs are OFF but the Shutdown command was not received yet.
it’s ON when TQOFF Inputs are OFF after Safety Function is activated. It can be removed by sending
the Shutdown command in Control word.
Bit 4 - TQOFF1: The input assigned as TQOFF1 is OFF.
Bit 5 - TQOFF2: The input assigned as TQOFF2 is OFF.
Rev.37
FASTECH Co., Ltd.
91
Summary of Contents for Ezi-STEPII EtherCAT MINI
Page 10: ...Chapter 1 Product Specification Rev 37 FASTECH Co Ltd 10 ...
Page 14: ...Chapter 2 Installation Rev 37 FASTECH Co Ltd 14 ...
Page 25: ...Chapter 3 EtherCAT Communication Rev 37 FASTECH Co Ltd 25 ...
Page 31: ...Chapter 4 CiA402 Drive Profile Rev 37 FASTECH Co Ltd 31 ...
Page 55: ...Chapter 5 Operation Rev 37 FASTECH Co Ltd 55 ...
Page 59: ...Chapter 6 EtherCAT Object Dictionary Rev 37 FASTECH Co Ltd 59 ...





















































