























6. EtherCAT Object Dictionary
Information
This object can NOT be set while it’s ’Operation Enabled’ state. Please set after ’Operation Disable’.
Please refer to
6.6.11
Object 200Dh: Position control gain
Sub
PDO
Value
Default
Index
index
Name
Type
Access
SAVE
Mapping
Range
Value
200Dh
0
Position control gain
U8
RW
Yes
No
0
∼
63
3
This Object sets Position control gain.
This is a function to adjust the positioning response according to the load mounted on the motor when
the motor is stopping.
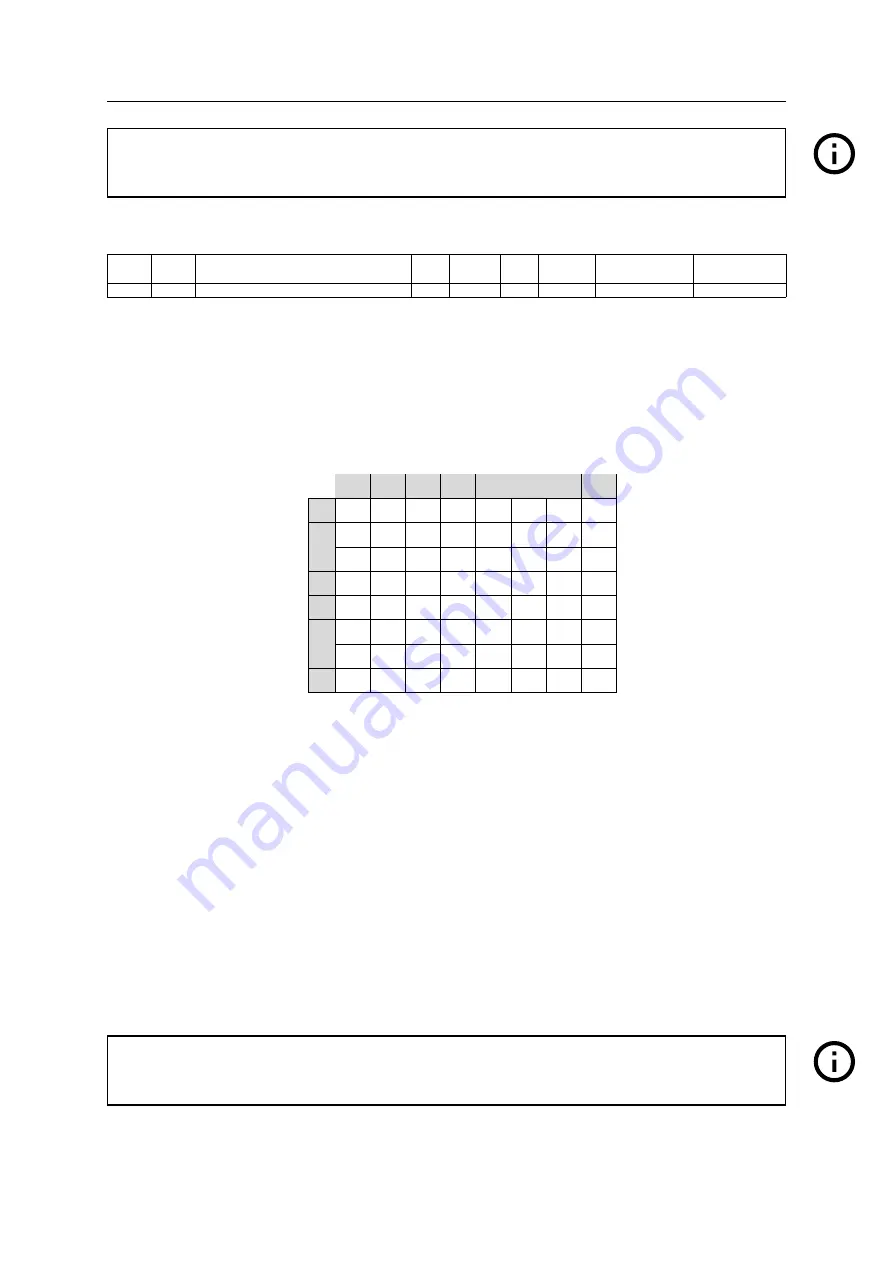
Position control gain is determined by a combination of bandwidth tuning value and gain tuning value.
Position control gain
=
Bandwidth Tuning Value
×
8 +
Gain Tuning Value
Gain Tuning Value
0
1
2
3
4
5
6
7
0
0
1
2
3
4
5
6
7
1
8
9
10
11
12
13
14
15
2
16
17
18
19
20
21
22
23
3
24
25
26
27
28
29
30
31
4
32
33
34
35
36
37
38
39
5
40
41
42
43
44
45
46
47
6
48
49
50
51
52
53
54
55
Bandwidth
T
uning
V
alue
7
56
57
58
59
60
61
62
63
Table 6.37: Definition of Position control gain
The bandwidth tuning value sets the mechanical bandwidth range for the inertial load and affects the
stability of the system.
Smaller gain tuning value result in greater responsiveness to positional deviation, and greater overshoot
/ vibration. Greater gain tuning value result in smaller responsiveness to positional deviation, and smaller
overshoot / vibration.
The setting procedure for these two value is as follows:
1. Set the bandwidth tuning value to ensure stable operation according to the inertia load of the motor.
(Greater interia load
⇒
Greater bandwidth tuning value)
If the bandwidth tuning value is greater, the response line become slow, so set it to the minimum
to ensure stability.
2. After the bandwidth tunint value is determined, the gain tuning value is set to obtain the desired
response.
(Faster Responsiveness
⇒
Smaller gain tuning value)
Information
This object can NOT be set while it’s ’Operation Enabled’ state. Please set after ’Operation Disable’.
Please refer to
Rev.37
FASTECH Co., Ltd.
99
Summary of Contents for Ezi-SERVOII
Page 10: ...Chapter 1 Product Specification Rev 37 FASTECH Co Ltd 10...
Page 12: ...1 Product Specification 1 2 Product Dimension Figure 1 2 Dimensions Rev 37 FASTECH Co Ltd 12...
Page 15: ...Chapter 2 Installation Rev 37 FASTECH Co Ltd 15...
Page 29: ...Chapter 3 EtherCAT Communication Rev 37 FASTECH Co Ltd 29...
Page 35: ...Chapter 4 CiA402 Drive Profile Rev 37 FASTECH Co Ltd 35...
Page 67: ...Chapter 5 Operation Rev 37 FASTECH Co Ltd 67...
Page 71: ...Chapter 6 EtherCAT Object Dictionary Rev 37 FASTECH Co Ltd 71...