





























EXPERT Standard Series User Manual
130
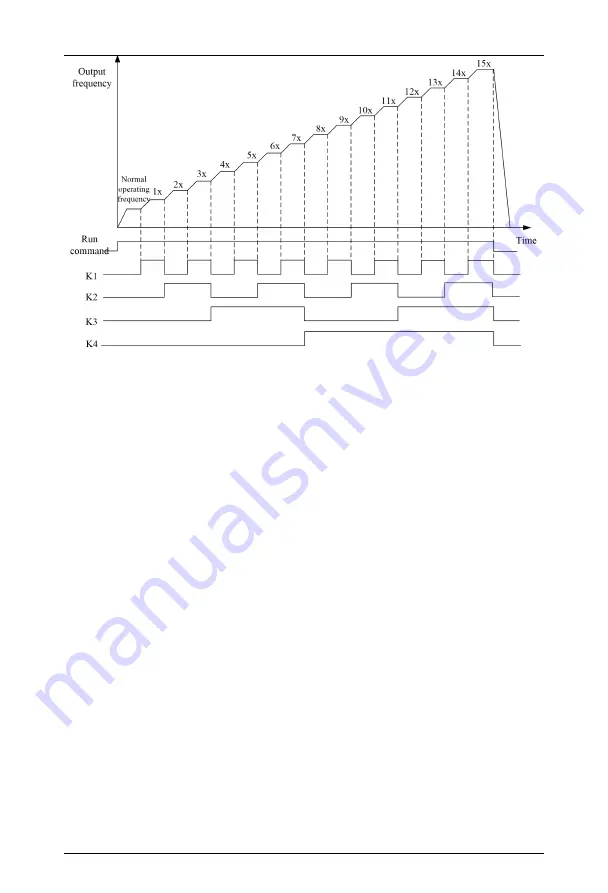
Figure 6-22 Multistage Speed Operation Schematic Diagram
In Figure 6-23, take the terminal run command channel an example, set F6.03=36 and
F6.04=37, and you can use K5 and K6 to control the operation direction. Through the
different logical combinations between K1, K2, K3 and K4, you can select the normal
operation frequency and 1~15 multistage frequencies for multistage speed operation
according to the above table.







































































