

























Technical data
Micropilot M FMR244 with FOUNDATION Fieldbus
90
Hauser
10
Technical data
10.1
Additional technical data
10.1.1
Input
Measured variable
The measured variable is the distance between a reference point and a reflective surface (i.e.
medium surface).
The level is calculated based on the tank height entered.
The level can be converted into other units (volume, mass) by means of a linearization.
Operating frequency
• FMR244: K-band
Up to 8 Micropilot M transmitters can be installed in the same tank because the transmitter pulses
are statistically coded.
Transmitting power
Average energy density in beam direction:
10.1.2
Output
Output signal
FOUNDATION Fieldbus
Signal on alarm
Error information can be accessed via the following interfaces:
• Local display:
– Error symbol (see Page 29)
– Plain text display
• Current output
• Digital interface
Linearization
The linearization function of the Micropilot M allows the conversion of the measured value into any
unit of length or volume. Linearization tables for calculating the volume in cylindrical tanks are pre-
programmed. Other tables of up to 32 value pairs can be entered manually or semi-automatically.
10.1.3
Performance characteristics
Reference operating
conditions
• temperature = +20 °C (68 °F) ±5 °C (9 °F)
• pressure = 1013 mbar abs. (14.7 psia) ±20 mbar (0.3 psi)
• relative humidity (air) = 65 % ±20%
• ideal reflector
• no major interference reflections inside the signal beam
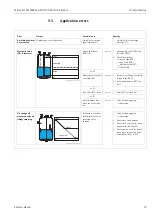
Maximum measured error
Typical statements for reference conditions, include linearity, repeatability, and hysteresis:
• FMR 244: up to10 m ±3 mm, off10 m ±0,03% of measuring range
Resolution
Digital / analog in % 4…20 mA
• FMR 244: 1mm / 0.03 % of measuring range
Distance
Average energy density
1 m
< 4 nW/cm
2
5 m
< 0,16 nW/cm
2