





























T ro u b le - sh o o tin g
Micropilot M FMR244 with FOUNDATION Fieldbus
80
Hauser
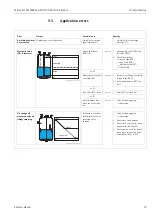
Error
Output
Possible cause
Remedy
If the surface is not
calm (e.g. filling,
emptying, agitator
running), the
measured value
jumps sporadically
to a higher level
L00-FMR2xxxx-19-00-00-en-015
L00-FMR2xxxx-19-00-00-en-016
Signal is weakened by
the rough surface – the
interference echoes are
sometimes stronger
1.
Carry out tank mapping
→
basic
setup
2.
Set the process cond. (004) to
"turb. surface" or "agitator"
3.
Increase the output damping
(058)
4.
Optimise the orientation
(see Page 81)
5.
If necessary, select a better
mounting position and/or larger
antenna (see Page 13)
During filling/
emptying the
measured value
jumps ownwards
L00-FMR2xxxx-19-00-00-en-017
Multiple echoes
yes
→
1.
Check the tank shape (002), e.g.
"dome ceiling" or "horizontal
cyl"
2.
In the range of the blocking dist.
(059) there is no echo evaluation
→
Adapt the value
3.
If possible, do not select central
installation position
(see Page 13)
4.
Perhaps use a stilling well
(see Page 19)
E 641 (loss of
echo)
L00-FMR2xxxx-19-00-00-en-018
Level echo is too weak.
Possible causes:
• Rough surface due to
filling/ emptying
• Agitator running
• Foam
yes
→
1.
Check application arameters
(002), (003) and (004)
2.
Optimise alignment
(see Page 81)
3.
If necessary, select a better instal-
lation position and/or larger
antenna (see Page 13)
E 641 (loss of
echo) after turn on
the power supply
If the instrument is configured to Hold by loss of
echo the output is set to any value/current.
noise level during the
initialisation phase to
high.
Repeat once more empty calibr.
(005).
Caution!
Before conformation change with
O
or
S
to the edit mode.
100%
0%
t
→
actual
expected
100%
0%
t
→
actual
expected
100%
0%
t
→
actual
expected
100%
E 641
0%
t
→
eingetreten
erwartet







































































