





























Safet
Introducti
Inst
Pow
Pro Sof
C
How
How
C
S
S
Parame
Drive
D
G
Ind
e
EZMotion User/Programming Guide
89
Revision A8
www.controltechniques.com
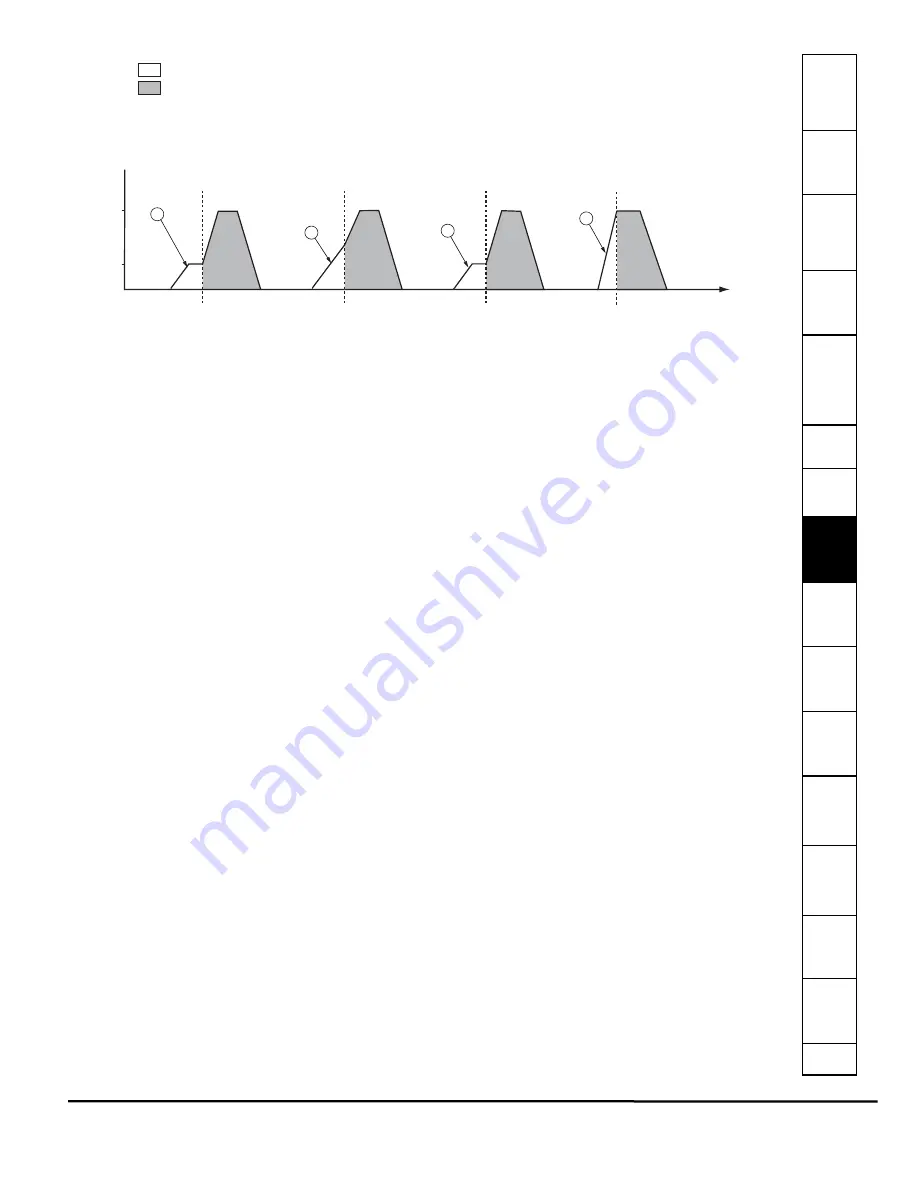
Figure 89:
Ramps Examples of a Slow Index to a Faster Index
1.
Index.0.Accel specified by user is used to accelerate up to Index.0.Vel. Index.0.Accel is aggressive enough to
reach Index.0.Vel within Index.0.Dist of 5 Revs. Since indexes are compounded together, Index 1 begins at
Index.0.Vel.
2.
When indexes are Blended, Index 0 should end at velocity of Index 1, but Index.0.Accel is not aggressive
enough to reach Index.1.Vel within Index.0.Dist of 5 Revs. Therefore, entire distance of Index 0 is used to
accelerate towards Index.1.Vel.
3.
Acts the same as the Compound with User Ramps because Index.0.Accel entered by user is aggressive enough
to reach Index.0.Vel of 500 RPM. If Index.0.Accel entered by the user was not aggressive enough to reach 500
RPM within 5 Revs, necessary ramp would be calculated.
4.
Acceleration ramp is automatically calculated to reach Index.1.Vel within Index.1.Dist of 5 Revs. If user had
entered a ramp aggressive enough to reach Index.1.Vel within 5 Revs, no automatic ramp calculation would be
required, and the user entered acceleration rate would be followed.
Ramps
Stop Deceleration
The value you enter here defines the deceleration rate which is used when the Stop destination is activated. The default is 100
RPM/second.
The Stop destination is found in the Ramps Group in the Assignments view.
Feedhold Decel/Accel
When the Feedhold destination is activated, the motor will decelerate to a stop in the time specified by the
FeedholdDecelTime parameter. When feedhold is cleared, the motor will accelerate back to speed in the same specified
period of time.
Feedhold is a means to halt the motor within a velocity profile and then return to the profile later at the exact same place in the
profile. Feedhold does not ramp and does not decelerate in terms of velocity. Instead, it stops by decelerating time. For
example, if the motor is running at 50 revs/second and feedhold is activated with 2 seconds specified in the
FeedholdDecelTime parameter, then the motor will actually slow and stop in 2 seconds as measured time (on a time/velocity
profile) goes from 100% to 0%.
Travel Limit Deceleration
The value entered here is the deceleration ramp that is used when a software or hardware travel limit is hit.
8.4.10 Current View
The Current view allows the user to configure Current Level Flags and Current Limits for use in the application.
= Index 0
= Index 1
1250
500
1
2
3
4
t
V
Compound Index
User Ramps
Blended Index
Auto Ramps
Blended Index
User Ramps
Compound Index
Auto Ramps
Summary of Contents for EZMotion
Page 2: ......
Page 12: ...x EZMotion User Programming Guide www controltechniques com Revision A8 ...
Page 18: ...6 EZMotion User Programming Guide www controltechniques com Revision A8 ...
Page 36: ...24 EZMotion User Programming Guide www controltechniques com Revision A8 ...
Page 158: ...146 EZMotion User Programming Guide www controltechniques com Revision A8 ...
Page 186: ...174 EZMotion User Programming Guide www controltechniques com Revision A8 ...
Page 266: ...256 EZMotion User Programming Guide www controltechniques com Revision A8 ...
Page 267: ......