





























Interfaces
- 21 -
8.2
Interface CANopen (option CA0)
When ordering option “CA0”, the encoder is equipped with a CAN interface according to the CANopen stand-
ard DS406. To start the communication (start sending) an NMT command must be given first. If the position
value is needed to be sent automatically after power on, the special version 11 can be ordered (
12).
The following identifiers are given:
CAN - Identifier
(6 byte telegram)
181 h (16)
= Identifier
First 4 bytes
= Position (resolution 0.01 mm), bit rate 250 KB/s
Following 2 bytes
= velocity in mm/s
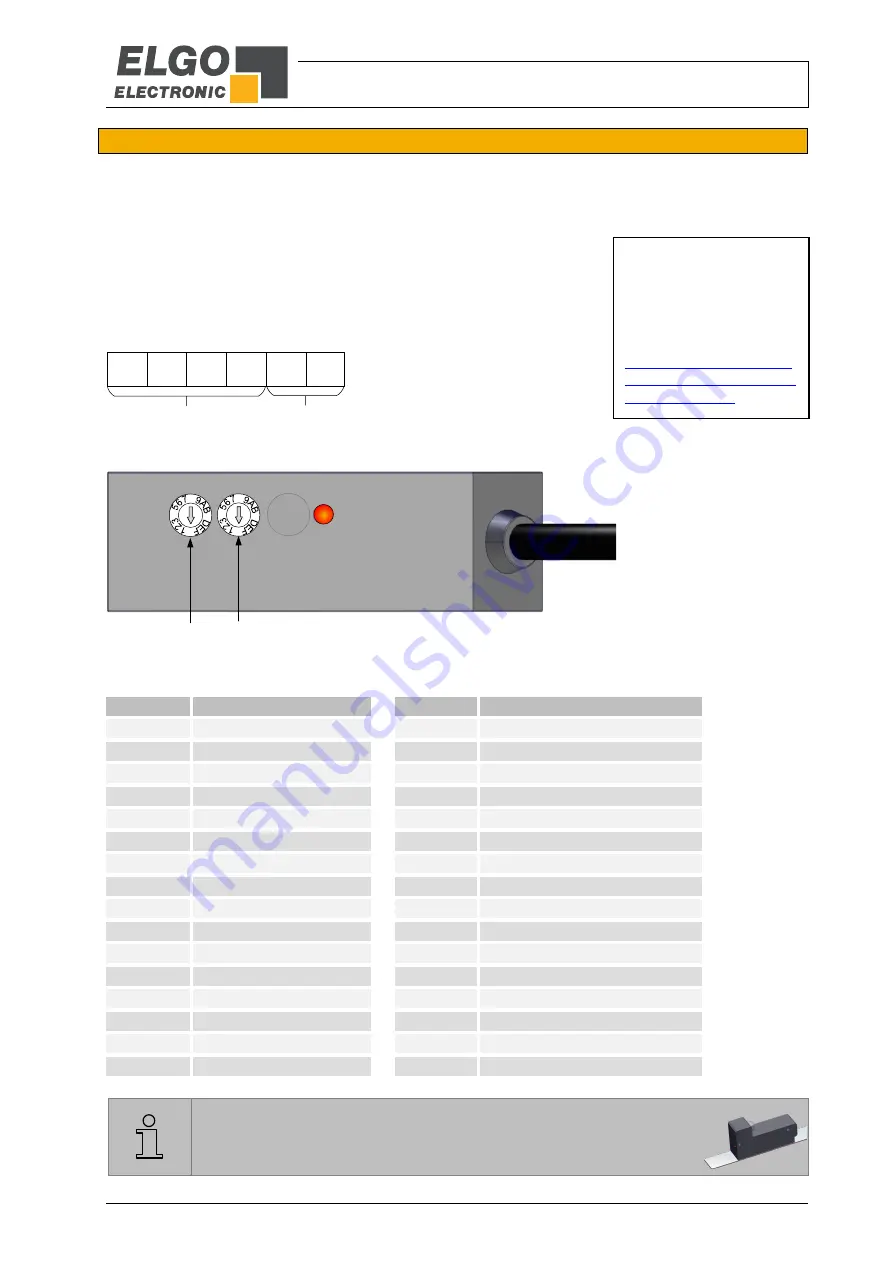
The CAN-Identifier can be adjusted in the range of 181
(16)
to 18F
(16)
by rotary code switches, which are located
behind a protection cap on the top of the sensor housing:
Figure 11: Bit rate and CAN identifier settings
Table 2: Bit rate and CAN-Identifier with option CA0
Position
Bit rate (left)
Position
CAN identifier (right)
0
-
0
Identifier from memory
1
-
1
181
2
-
2
182
3
-
3
183
4
-
4
184
5
-
5
185
6
-
6
186
7
-
7
187
8
bit rate from memory
8
188
9
1 MBit/s
9
189
A
800 kBit/s
A
18A
B
500 kBit/s
B
18B
C
250 kBit/s
C
18C
D
125 kBit/s
D
18D
E
100 kBit/s
E
18E
F
50 kBit/s
F
18F
REMARK!
No coding switches are accessible on the sensor housing with M9 round
connector. Therefore, please specify the desired configuration when ordering!
LSB MSB LSB MSB
Position Velocity
Bit rate CAN identifier
0
4
8
C
0
4
8
C
All available CAN options
and information about the
DS406 device profile can
be found in the corre-
sponding EDS or XDD file.
Download:
min/user_upload/software/
EMAX_DS406.zip







































































