
























Mechanical Operations and Maintenance Manual for Industrial Robot ER10-1600
5
Attention
In a large-scale system, multiple operators are involved in the work. When it is
necessary to talk at a distance, the intention should be correctly conveyed by means
of gestures, etc.
Factors such as noise in the environment can make it impossible to convey the
meaning correctly and cause accidents.
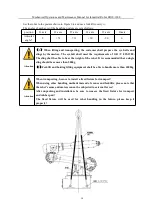
Attention
Industrial robot gesture method (example)
1. Connect: Do the work
related to the connection
2. No way! Disconnect:
Raise your right hand and
wave vigorously left and
right
3. Is
that
OK?
(to
confirm):Raise your right
hand up high forward
4. OK: Raise your right
hand up high forward
Use your thumb and index
finger to form a circle
5. Wait a moment: The
right hand is facing the
opponent
Straight
up
arms
horizontally
6.
Leave: Stretch your
right arm horizontally
and weave to the left
Attention
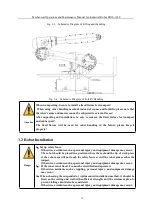
Operators should also maintain awareness of escape at all times during operations.
It must be ensured that in an emergency, you can escape immediately.
Attention
Always pay attention to the actions of the robot, and do not work with your back to
the robot.
Slow response to robot movements can also lead to accidents.







































































