





























Settings
EFORT INTELLIGENT EQUIPMENT CO.,LTD
72
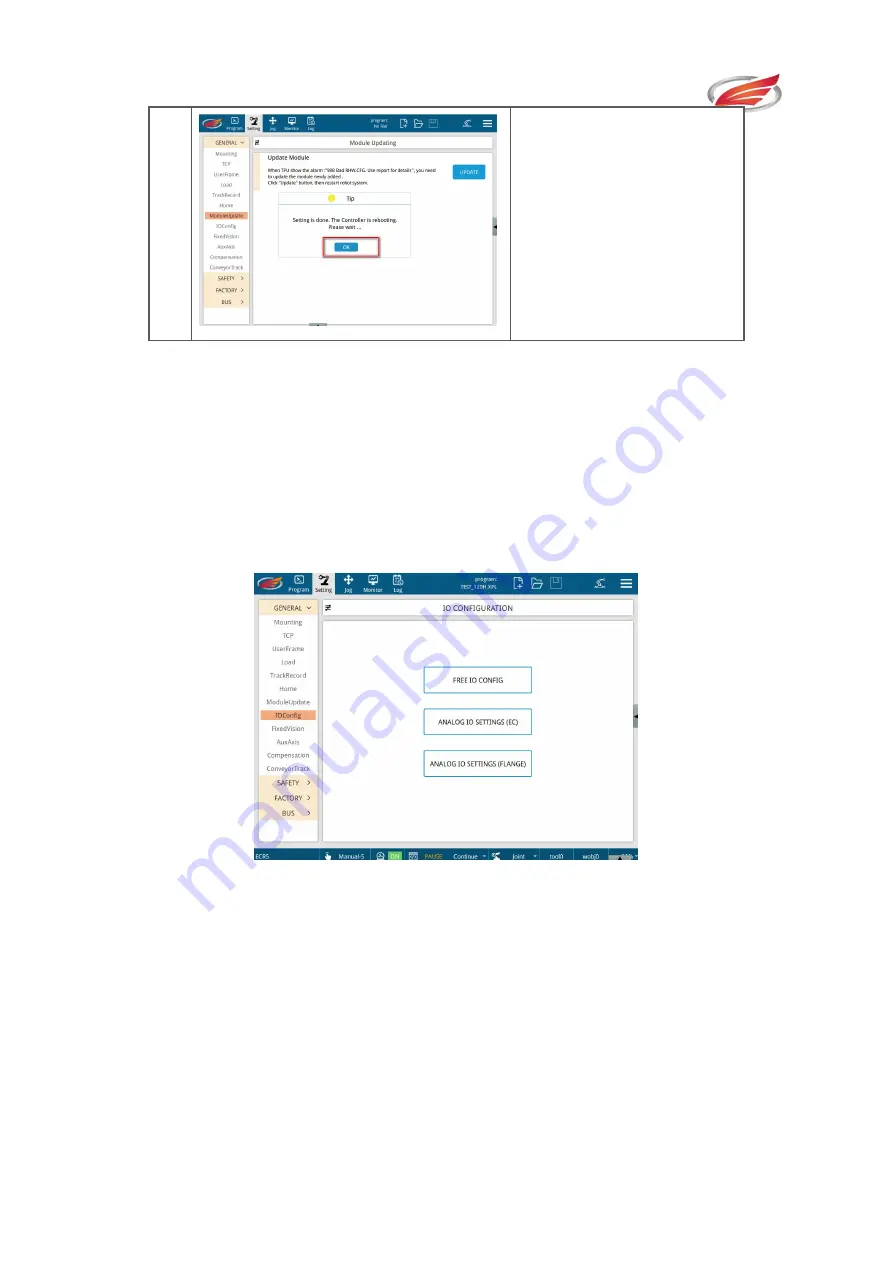
5.1.8 I/O Configuration
The IO configuration function page has the following 2 functions:
For a certain digital IO port, bind it to a certain system function.
DI: When an external level is placed on the port, it triggers the bound system function.
DO: When this system function is in effect, it will set the bound digital IO port high and
low.
Set the analog type of the analog IO port: current type, voltage type.
Fig.5-14 Main Interface of “IO configuration”





















































