

















67
T
ORQUE
R
EFERENCES
G
EAR
M
OTOR
, C
UTTING
H
EAD
,
AND
F
RONT
W
HEEL
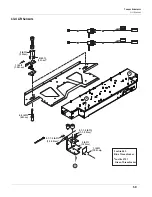
13.12 Gear Motor, Cutting Head, and Front Wheel
1 – A - Gear motor assembly
2 – B - Cutting head assembly
3 – C - Front wheel assembly
2.2 lbf·
Ō
(3 N·m)
†
4.5 lbf·
Ō
(6 N·m)
†
A
B
4.5 lbf·
Ō
(6 N·m)
1.5 lbf·
Ō
(2 N·m)
†
4.5 lbf·
Ō
(6 N·m)
†
1.5 lbf·
Ō
(2 N·m)
C
7.5 lbf·
Ō
(10 N·m)
9 lbf·
Ō
(12 N·m)
1.0 lbf·
Ō
(1.5 N·m)
†
Loctite 243
Blue Threadlocker
††
Loctite 2701
Green Threadlocker







































































