


















16
Set the I/O control mode switch off (write):
Send:
01 06 04 02 00 00 29 3A
Return: 01 06 04 02 00 00 29 3A
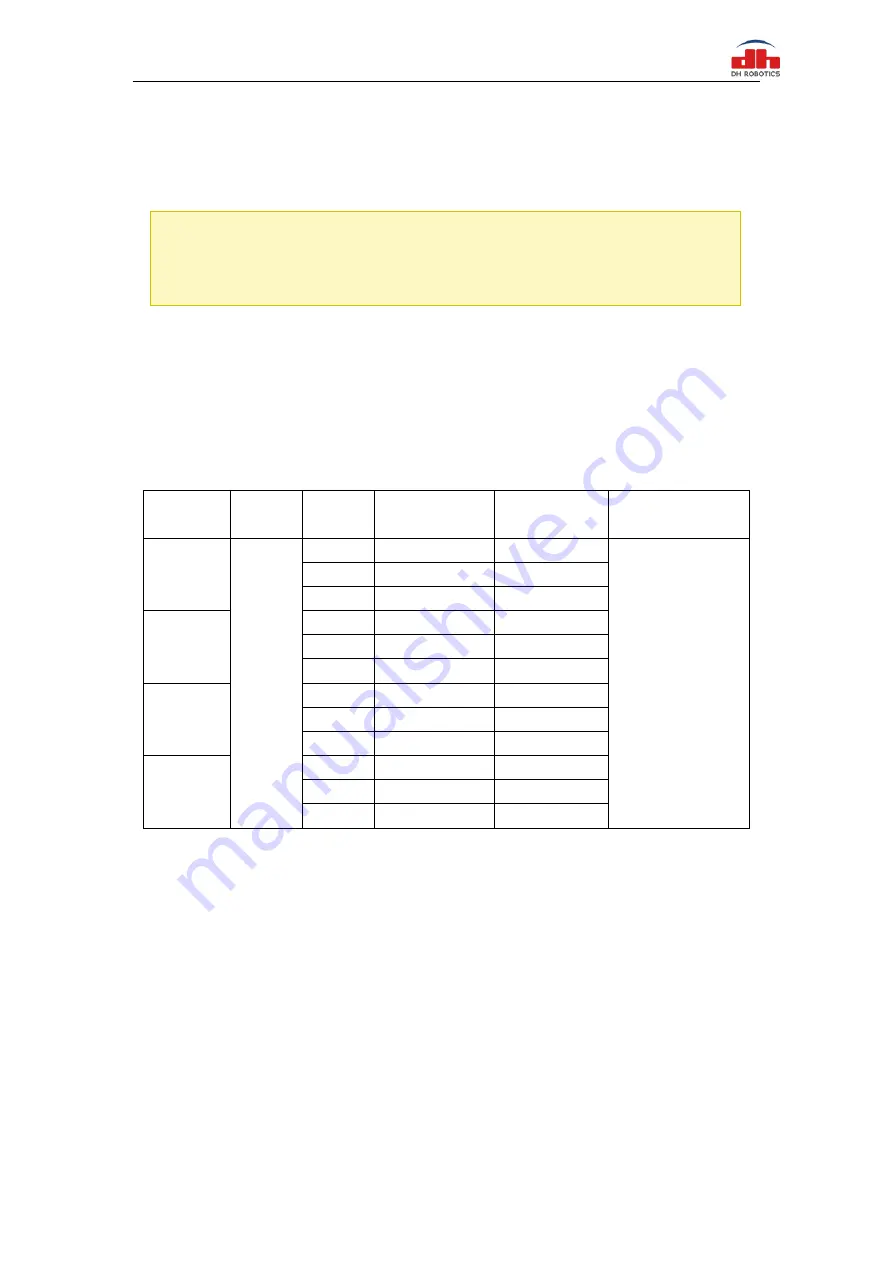
2.3.4.16 I/O Parameter Configuration
Those registers are used to Set the I/O Parameters.
The address is 0x0405-0x0410. The description of this register is shown in Table 2.20.
Table 2.20 I/O Parameter Configuration
Function
High-
byte
Low
bytes
Description
Write
Read
I/O Group 1
0x04
0x05
position 1
0-1000
‰
Current setting
0x06
force 1
20-100 %
0x07
speed 1
1-100 %
I/O Group 2
0x08
position 2
0-1000
‰
0x09
force 2
20-100 %
0x0A
speed 2
1-100 %
I/O Group 3
0x0B
position 3
0-1000
‰
0x0C
force 3
20-100 %
0x0D
speed 3
1-100 %
I/O Group 4
0x0E
position 4
0-1000
‰
0x0F
force 4
20-100 %
0x10
speed 4
1-100 %
Example:
Set the first group of I/O parameter (write) :
Send:
01 06 04 05 01 2C 98 B6
(Reference position: 300
‰
)
Return: 01 06 04 05 01 2C 98 B6
Send:
01 06 04 06 00 1E E8 F3
(Force: 30%))
Return: 01 06 04 06 00 1E E8 F3
Send:
01 06 04 07 00 1E B9 33
(Speed: 30%)
Return: 01 06 04 07 00 1E B9 33
IO parameter address is continuous address, and four groups of IO parameters can be
configured at one time by using the function code of 0x10, as follows:
NOTE
·
If you just need to control the gripper through Modbus RTU, you should write 0 to this
register and save all parameters to turn off the I/O control mode.