





























1
[OK]: The first parameter in the group is shown.
2
Press [
▼
] repeatedly to move down to the parameter.
3
Press [OK] to start editing.
4
[
►
]: First digit flashing (can be edited).
5
[
►
]: Second digit flashing (can be edited).
6
[
►
]: Third digit flashing (can be edited).
7
[
▼
]: Decreases the parameter value, the decimal point
changes automatically.
8
[
▲
]: Increases the parameter value.
9
[Back]: Cancel changes, return to 2.
[OK]: Accept changes, return to 2.
10 [
▲
][
▼
]: Select parameter within the group.
11 [Back]: Removes the value and shows the parameter group.
12 [
▲
][
▼
]: Select group.
Table 3.5 Changing Values in Continuous Parameters
For enumerated parameters, the interaction is similar, but
the parameter value is shown in brackets because of the
digits limitation (4 large digits) on NLCP, and the enum can
be greater than 99. When the enum value is greater than
99, the LCP can only show the first part of the bracket.
130BC447.11
Setup 1
Setup 1
Setup 1
1
2
3
4
5
6
OK
OK
Back
7
OK
Back
Illustration 3.6 Main Menu Interactions - Enumerated
Parameters
1
[OK]: The first parameter in the group is shown.
2
Press [OK] to start editing.
3
[
▲
][
▼
]: Change parameter value (flashing).
4
Press [Back] to cancel changes or [OK] to accept changes
(return to screen 2).
5
[
▲
][
▼
]: Select a parameter within the group.
6
[Back]: Removes the value and shows the parameter group.
7
[
▲
][
▼
]: Select a group.
Table 3.6 Changing Values in Enumerated Parameters
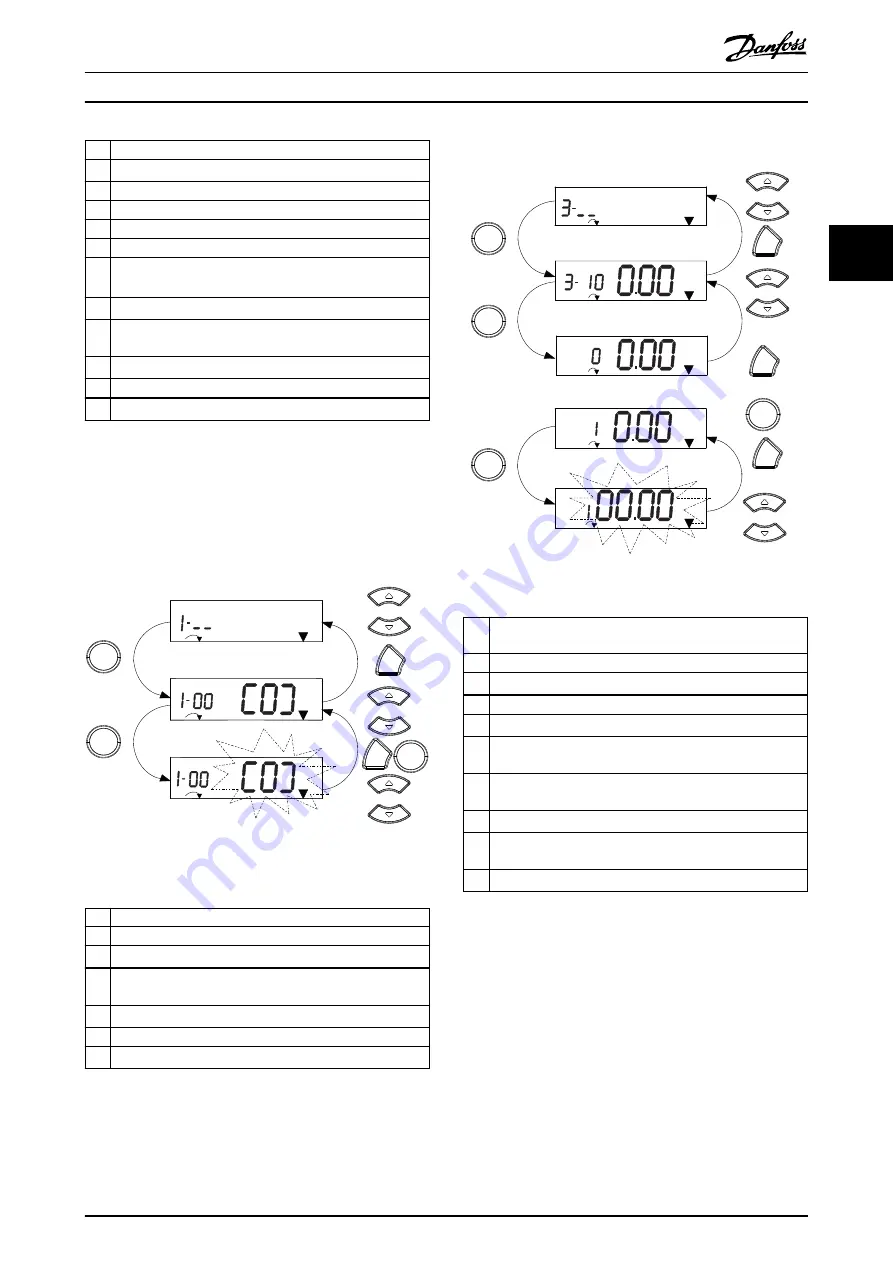
Array parameters function as follows:
130BC448.10
1
2
4
5
6
7
8
9
10
OK
Back
Back
Back
5 x
Setup 1
Setup 1
Setup 1
Setup 1
%
INDEX
%
INDEX
%
INDEX
Setup 1
INDEX
%
OK
OK
OK
Illustration 3.7 Main Menu Interactions - Array Parameters
1
[OK]: Shows parameter numbers and the value in the first
index.
2
[OK]: Index can be selected.
3
[
▲
][
▼
]: Select index.
4
[OK]: Value can be edited.
5
[
▲
][
▼
]: Change parameter value (flashing).
6
[Back]: Cancels changes.
[OK]: Accepts changes.
7
[Back]: Cancels editing index, a new parameter can be
selected.
8
[
▲
][
▼
]: Select parameter within the group.
9
[Back]: Removes parameter index value and shows the
parameter group.
10 [
▲
][
▼
]: Select group.
Table 3.7 Changing Values in Array Parameters
Programming
Programming Guide
MG07C102
Danfoss A/S © 12/2015 All rights reserved.
17
3
3