





























98 | © Danfoss | August 2018
AQ00000211
ENGINEERING TOMORROW
11.3
OPEN LOOP FILTER
As a risk mitigation method, Danfoss wants to avoid unintended spool actuation, etc. when driving on bumpy-ground,
therefore an open loop joystick and open loop mini-steering wheel signal filter has been applied to the PVED-CLS’s
steering wheel control algorithm.
Practically, if open loop mini-steering wheel has been selected as steering type, any mini-steering wheel signals, i.e. where
the steering angle velocity is below the value in P3649, will be disregarded.
Furthermore, if open loop joystick steering type has been selected, any joystick flow commands below the value in P3648
will be disregarded.
Name
A
ddr
es
s
D
at
a t
yp
e
U
ni
t
Description of parameter
U
se
r
Range
D
a
n
fo
ss
de
fa
ul
t
val
u
e
S
a
fet
y
cri
ti
ca
l
p
a
ra
m
et
ers
‘
S
’
Mi
n
.
M
ax.
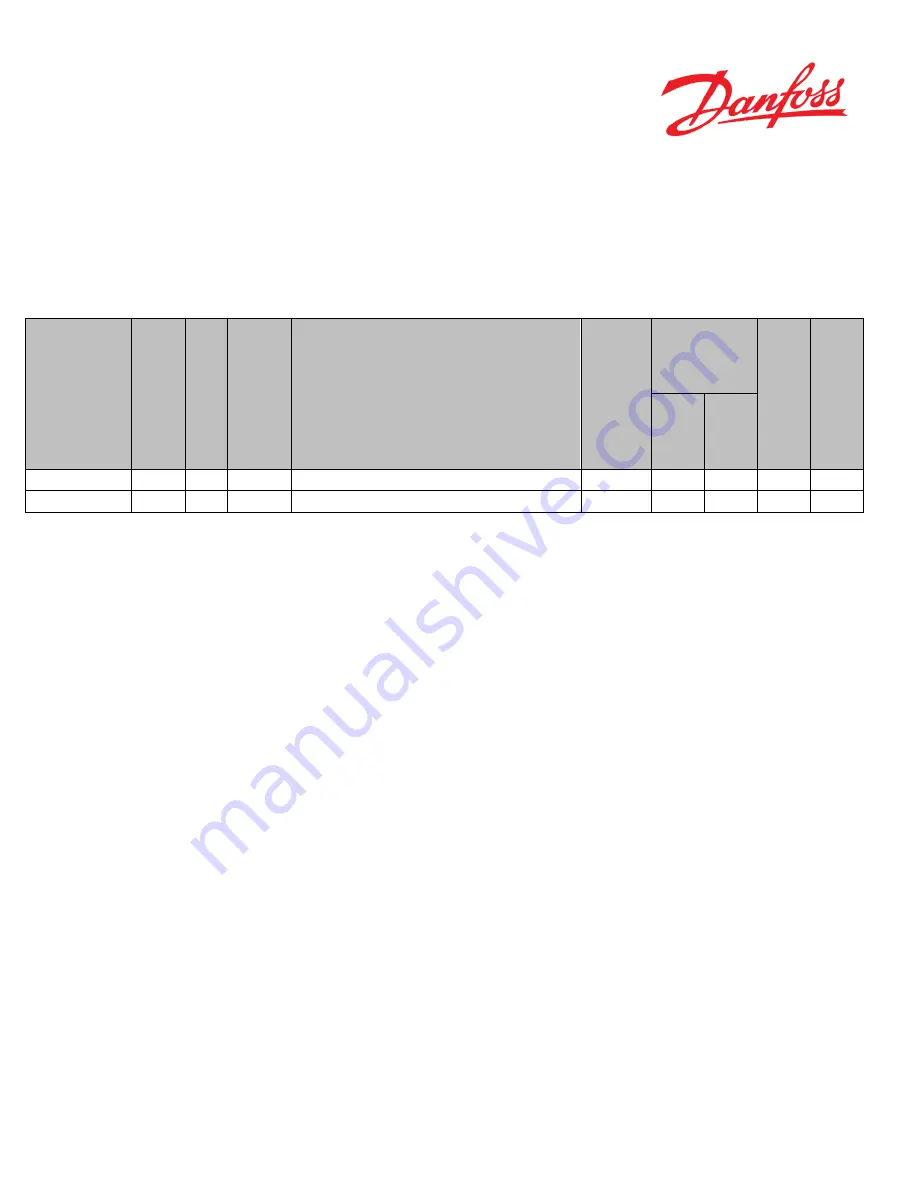
AUX – Joystick no-
activation threshold
P3648
U8
IR
Min Flow command from AUX joystick below which the flow command
of 0 is used by the AUX control algorithm
OEM
0
100
5
AUX - Mini-steering
no-activation threshold
P3649
U8
dRpm
Min AUX steering angle velocity value below which the angle velocity of
0 is used by the AUX control algorithm
OEM
0
100
5
Table 42 (b)
Summary of Contents for PVED-CLS
Page 6: ...6 Danfoss August 2018 AQ00000211 ENGINEERING TOMORROW ...
Page 71: ... Danfoss August 2018 AQ00000211 71 ENGINEERING TOMORROW Figure 29 ...
Page 127: ... Danfoss August 2018 AQ00000211 127 ENGINEERING TOMORROW ...
Page 147: ... Danfoss August 2018 AQ00000211 147 ENGINEERING TOMORROW ...
Page 182: ...182 Danfoss August 2018 AQ00000211 ENGINEERING TOMORROW ...