





























Set Sse to 3 to select the sensitivity related to vehicle speed.
Sts0 sets the steering ratio when the vehicle is standing still. Sts0 applies at all times when the vehicle
signal unintentionally is not configured as PRESENT (Ve remains 0). In case the vehicle speed signal is not
diagnosed, it is recommended to set Sts0 at a value where sufficient directional stability at maximum
vehicle speed is present. The default value is set a value common to fast driving mobiles
Sts1 sets the steering ratio when the vehicle is driving at 6.25% of Vesm.
Sts2 sets the steering ratio when the vehicle is driving at 12.50% of Vesm.
Sts3 sets the steering ratio when the vehicle is driving at 25.00% of Vesm.
Sts4 sets the steering ratio when the vehicle is driving at 50.00% of Vesm.
Sts5 sets the steering ratio when the vehicle is driving at 100.00% of Vesm.
Vesm sets the region where steering sensitivity is variable to vehicle speed.
The default value is set at the maximum speed of most applications.
Symbol
Index
Default
Value range
Sse
1y09
1
Must be set at 3
Sts0
1y10
400
20 to 1200
Sts1
1y11
400
Sts0 to 1200
Sts2
1y12
400
Sts1 to 1200
Sts3
1y13
400
Sts2 to 1200
Sts4
1y14
400
Sts3 to 1200
Sts5
1y15
400
Sts4 to 1200
Vesm
1y16
500
1 to 1000 (0.0 to 100.0 km/h)
Please note the parameter dependency of Sts. Steering sensitivity of 400 equals to 4.00 steering wheel turns to move the steering actuator from YL to
YR (left to right end-lock position) See chapters Mapping steering signals and J1939 Vehicle Speed to acquire vehicle speed.
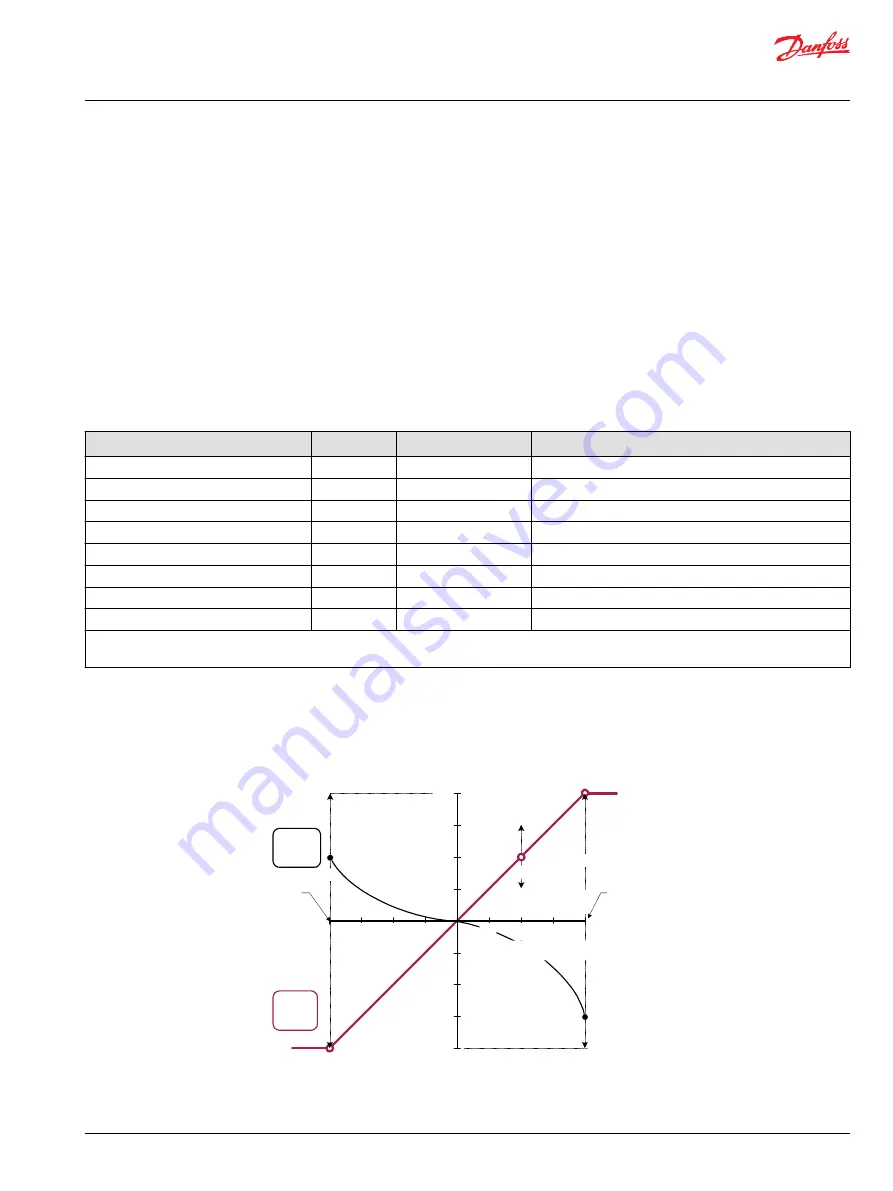
Create the Set-point
The transfer function provides three parameters to relate a sum of scaled steering wheel angle
increments to steering actuator set point position. The scaled steering wheel position is a sum of steering
wheel angle increments corrected by the current applied steering sensitivity and scaled according to the
operating ranges of variable Yact.
P005 201E
1000
1000
-1000
-1000
750
500
250
-500
-750
-250
-750
-500
-250
250
500
750
St
eer
ing ac
tua
tor
p
osition setp
oin
t
Right steering
actuator end-lock
Left steering
actuator end- lock
Saturation
saturation
YR
Lx
YL
Defaults
Lx = 0
YR = 1000
YL = -1000
Example
Lx = 10
YR = -750
YL = 500
Sum of scaled delta steering
wheel angle increments
1 unit=Sts/2000 % of 1
steering wheel revolution
Max sum for
activating the
steering wheel
CW
Min sum for
activating the
steering wheel
CCW
1 unit = 0.1% of
st
eer
ing ac
tua
tor a
t the
righ
t end lo
ck p
osition
1 unit = 0.1% of
st
eer
ing ac
tua
tor a
t the
lef
t end lo
ck p
osition
Lx Sets the curve linearity. The parameter is set down when the cylinder position is too far (over-steer) for
small steering angles or vice versa. The optimum value for this parameter is closely related to the
inherent linearity between steering actuator position and signal. This inherent linearity depends very
Operation Manual
PVED-CL Controller for Electro-Hydraulic Steering, Version 1.38
Steering by Steering Wheel – Closed Loop
©
Danfoss | May 2016
11025583 | AQ00000216en-US0302 | 55