




















Product User’s Manual –
4.0 BOARD LAYOUT
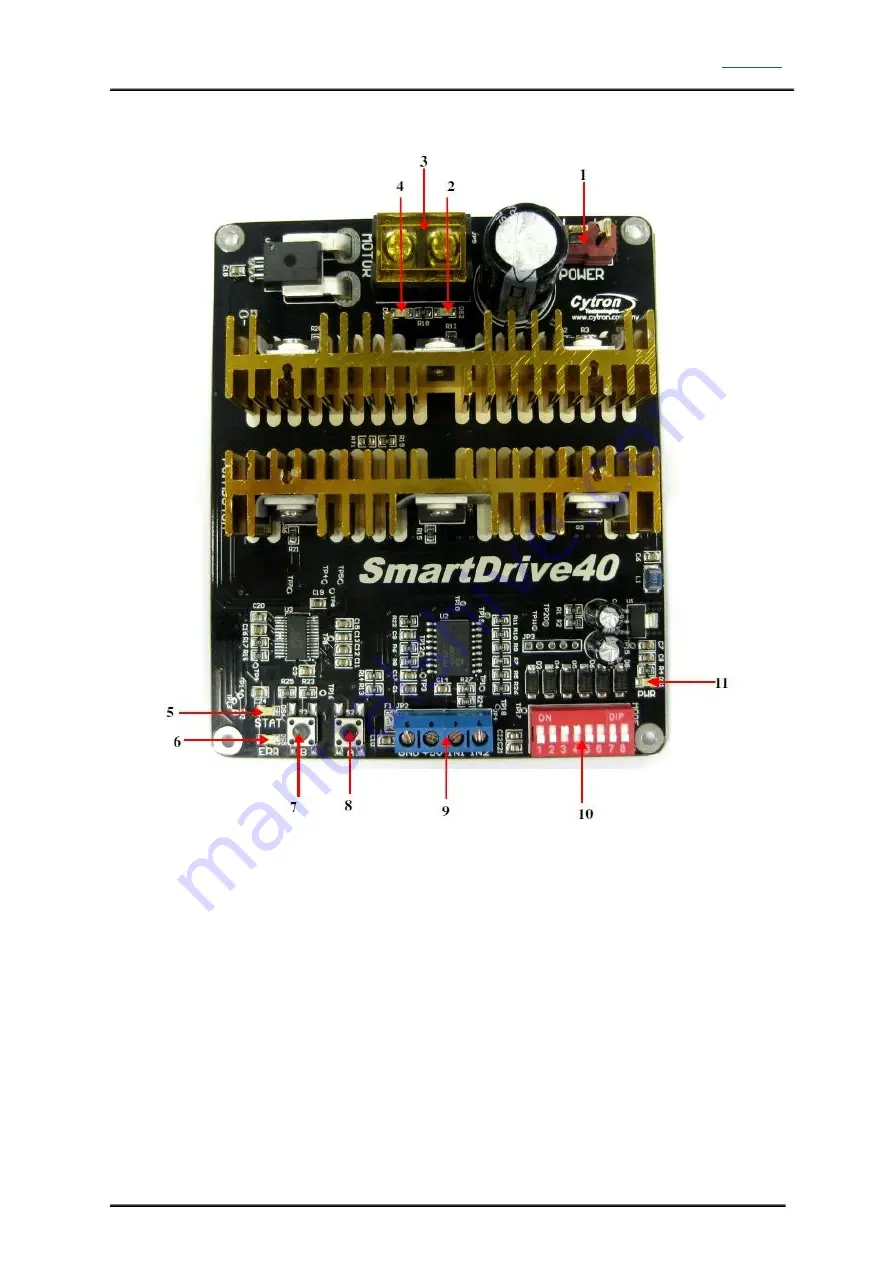
Components on MDS40A and their functions:
1.
Dean T Connector (Male) – Connect to power source. For high current application,
please solder the wire directly to the pad at bottom layer.
2.
LED A – Turns on when the output A is high and output B is low. Indicates the
current flows from output A to B.
3.
Terminal Block – Connect to motor. Reverse the polarity if the motor direction is
incorrect.
4.
LED B – Turns on when the output A is low and output B is high. Indicates the
current flows from output B to A.
5.
LED STAT – Status LED. Turn on when the motor is running. Turn off otherwise.
Created by Cytron Technologies Sdn. Bhd. – All Rights Reserved
6







































































