





























Safety
Information
Product
Information
Mechanical
Installation
Electrical
Installation
Getting
Started
Menu 0
Running
the motor
Optimisation
Macros
Advanced
Parameters
Technical
Data
Diagnostics
UL Listing
Information
Unidrive User Guide
187
Issue Number: 9 www.controltechniques.com
make the drive latch in the run state. Momentarily closing the run contact
for the opposite direction will make the drive change direction. Opening
the Run Permit contact will cause the drive to stop.
The drive run keypad button can also be used to latch a run state if it is
enabled (Pr
6.11
) and the fwd/rev keypad button can change direction if
it is enabled (Pr
6.13
) (unless one of the terminals is being held closed in
which case they have priority). The stop keypad button can also stop the
drive if it is enabled (Pr
6.12
) and the terminals are not forcing a run
condition. Any jog command received will only be accepted in the ready
or stop states. Run commands override jog commands.
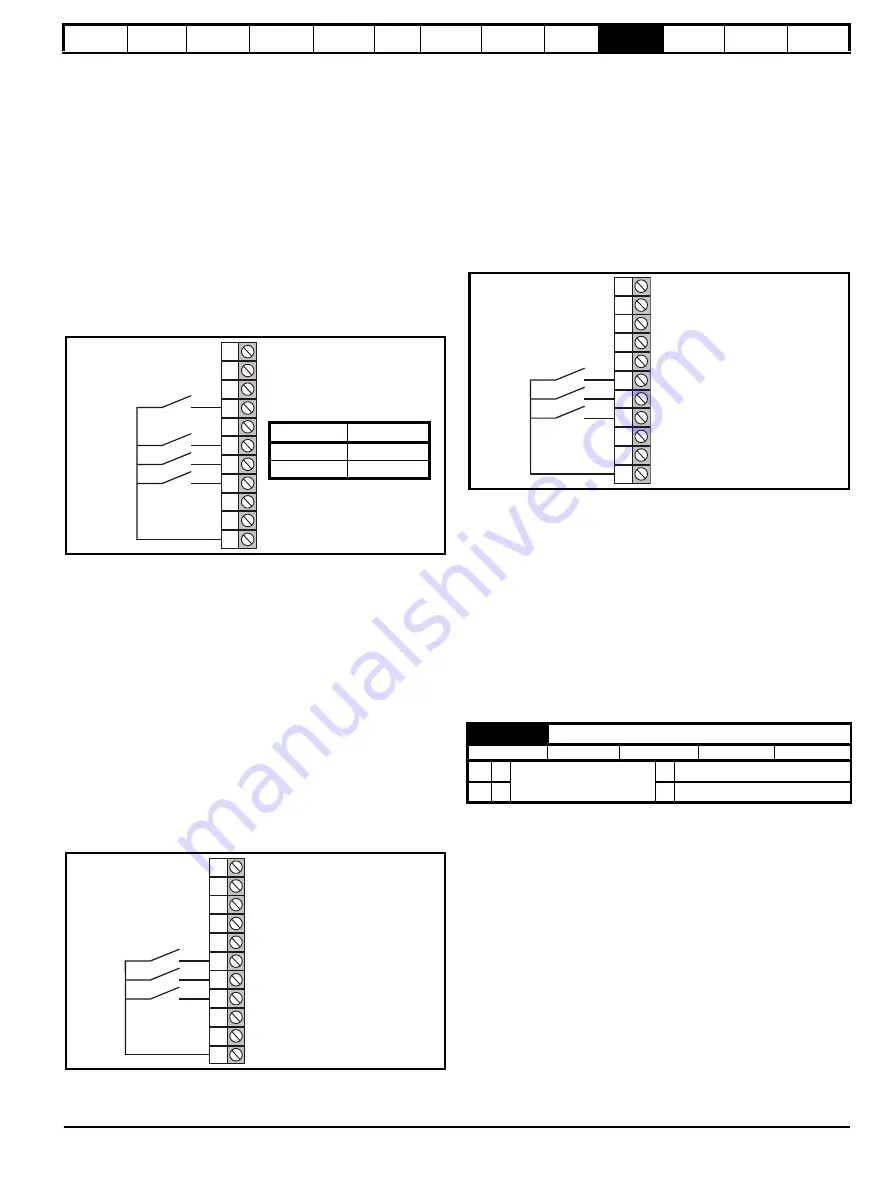
Sequencing mode 2: Wire Proof Mode
Run permit or /Stop (Pr
6.34
)
Run permit or 'not stop' input
Sequencing bit 0
(Pr
6.30
) Run
forward
Sequencing bit 1
(Pr
6.31
)
Jog
Sequencing bit 2
(Pr
6.32
) Run
reverse
Sequencing bit 3
(Pr
6.33
) Not
used
In this mode the Run Permit, and either the Run Forward or Run
Reverse contacts (but not both) must be closed for the drive to run. If
Run Forward and Run Reverse are selected at the same time the drive
will stop after a delay of 60ms. To jog forward or reverse, the Jog contact
must be closed together with the appropriate direction contact. Any jog
command received will only be accepted in the ready or stop states (i.e.
the Jog contact must be closed before the Run contact). Because this
mode requires terminals to be held in an active state at all times, the run,
stop, and fwd/rev keypad buttons on the drive are ignored even if they
are enabled.
Sequencing mode 3: PLC Mode
Run permit or /Stop (parameter
6.34
)
Not used
Sequencing bit 0
(parameter
6.30
)
Run
Sequencing bit 1
(parameter
6.31
)
Jog
Sequencing bit 2
(parameter
6.32
)
Forward/Reverse
Sequencing bit 3
(parameter
6.33
)
Not used
In this mode the drive will respond to the contacts as it finds them. To jog
forward or reverse, the Jog contact must be closed together with the Run
contact and the appropriate direction selected. Any jog command
received will only be accepted in the ready or stop states (i.e. the Jog
contact must be closed before the Run contact). As with mode 2, this
mode requires terminals to be held active and therefore the run, stop,
and fwd/rev keypad buttons on the drive are ignored even if they are
enabled.
Sequencing mode 4: Wire Proof PLC Mode
Run permit or /Stop (Pr
6.34
) Not
used
Sequencing bit 0
(Pr
6.30
) Run
forward
Sequencing bit 1
(Pr
6.31
)
Jog
Sequencing bit 2
(Pr
6.32
) Run
Reverse
Sequencing bit 3
(Pr
6.33
) Not
used
In this mode either the Run Forward or Run Reverse contacts must be
closed before the drive will run. All inputs are non-latching and when not
asserted the drive will stop immediately using the mode defined by the
stopping mode. If both Forward and Reverse contacts are closed then
the drive will stop. If the drive is operating in open-loop mode there is a
60ms delay after both forwards and reverse are selected before a stop is
initiated. To jog forward or reverse, the Jog contact must be closed
before the appropriate direction contact. Any jog command received will
only be accepted in the ready or Stop states. Because this mode
requires terminals to be held in an active state at all times, the run, stop,
and fwd/ rev keypad buttons on the drive are ignored even if they are
enabled.
10.22.7 Catch a spinning motor
Open Loop
The drive performs a sequence of operations to determine the motor
frequency before attempting to run the motor with full voltage applied.
These tests are carried out with a voltage defined by Pr
6.37
. The
frequency is first set to maximum frequency in the direction in which the
drive last ran. The frequency is ramped to zero at a rated defined by Pr
6.10
. If the machine frequency is not detected, the frequency is set to
maximum in the other direction and the test is repeated. If the frequency
is detected at any point the test is stopped, the voltage is ramped up at a
rate defined by Pr
6.37
and then the drive runs normally. If the frequency
is not detected the drive starts from 0Hz. If the drive is powered down
the previous direction of operation is not stored, and so the test begins in
the forward direction. It is important that if spinning start is selected then
the Voltage Mode, Pr
5.14
, must be set to 'Fd' (3) and not left in the
default value of 'Ur_I' (1).
Closed Loop
The ramp output is set to the actual motor speed when the drive is
commanded to start.
30
31
28
29
26
27
24
25
23
21
22
Run permit
Jog
Run Fwd
Run Rev
0V
Parameter changes required
Parameter
Value
8.10
6.34
8.12
0
30
31
28
29
26
27
24
25
23
21
22
Jog
Run
Fwd/Rev
0V
No other parameter changes
are required
6.09
Synchronize to a spinning motor
RW
Bit
OL
Ú
0 or 1
Ö
0
CL
Ú
Ö
1
30
31
28
29
26
27
24
25
23
21
22
Jog
Run Fwd
Run Rev
0V
No other parameter changes
are required
Summary of Contents for Unidrive 1 Series
Page 208: ......





















































