





























66
SM-Universal Encoder Plus User Guide
www.controltechniques.com
Issue Number: 6
Where:
t
D
= 1.25
µ
s
Time for whole message including CRC = Time for single turn po (Number of
turns bits + 5) x T
= Time for single turn po (Pr
x.09
+ 5) x T
For example an encoder with 12 turns bits, 13 bit single turn resolution and a baud rate
of 2M would give the following times:
Time for single turn position = 14
µ
s (13.75
µ
s rounded up)
Time for the whole message including CRC = 23
µ
s (22.25
µ
s rounded up)
SSI Comms
The whole position must be obtained from an SSI encoder before it can be used by the
Solutions Module, therefore the time for the single turn position and the time for the
whole message are the same. It is also assumed that t
D
≤
1.25
µ
s, where t
D
is the data
delay from the encoder for 105m of cable. This value would be significantly less for
shorter cable distances. It should be noted that all values are rounded up to the nearest
microsecond (
µ
s).
Time to obtain the position = ((No. of turns bits + Single turn reso 1) x T) + t
D
= ((Pr
x.09
+ Pr
x.11
+ 1) x T) + t
D
For example and encoder with 12 turns bits, 13 bit single turn resolution and a baud rate
of 1M would give the following time:
Time to obtain the position data = 28
µ
s (27.25
µ
s rounded up).
8.2
Electronic nameplate transfers
The electronic nameplate system is a means of storing some specific drive parameters
within the EEPROM of a Stegmann or Heidenhain encoder attached to the drive. The
parameters are transferred to the encoder using the Stegmann 485, or EndAt comms
protocols and stored are in two categories:
•
Motor object parameters
•
Performance object parameters.
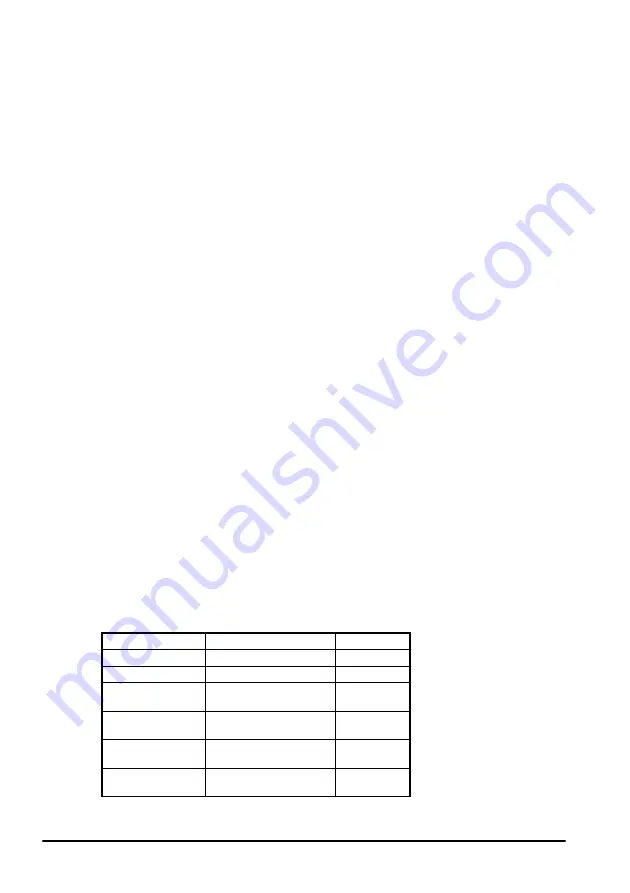
Loading/storing object parameters
Parameters may be transferred to or from the drive to a suitable encoder attached to the
drive or one of its Solutions Modules by entering a code into Pr
x.00,
110z0 and then
resetting the drive. The z in the request defines the location of the encoder for the
transfer, 0 = drive, 1 = option slot 1, 2 = option slot 2, and 3 = option slot 3.
Transfer
Data
Pr x.00 Code
Drive to encoder
Motor object parameters
110z0
Encoder to drive
Motor object parameters
110z1
Drive to encoder
Performance object block
1 parameters
110z2
Encoder to drive
Performance object block
1 parameters
110z3
Drive to encoder
Performance object block
2 parameters
110z4
Encoder to drive
Performance object block
2 parameters
110z5