




























polarization
FWD turns the feed clockwise, the
position sensor must increasing the
measured value. Turning angles are
between -180 to 180??
FWD turns the feed clockwise, the
position sensor must increasing the
measured value. Turning angles are
between -180 to 180??
sat-nms ACUs having the "ACU-ODM Software Upgrade Step Track" installed are capable to
track a satellite's position. The
following paragraph
describes how the sat-nms steptrack
algorithm works. Beside plain step track, this option includes the so called
adaptive tracking
and a
file/program tracking
facility as well. While step track and adaptive tracking require a beacon
receiver to be connected to the ACU, the file/program tracking works without any beacon
measurement.
8.3.1 The sat-nms Steptrack Algorithm
The principle of satellite step tracking is quite simple: For each axis, move the antenna a small
amount away from the satellite, move it a small amount to the other site and finally point the
antenna to that position where the signal is the strongest. The sat-nms ACU uses an optimized
variant of this method which lets the tracking find the best pointing ('peak') with a minimum
amount of depointing.
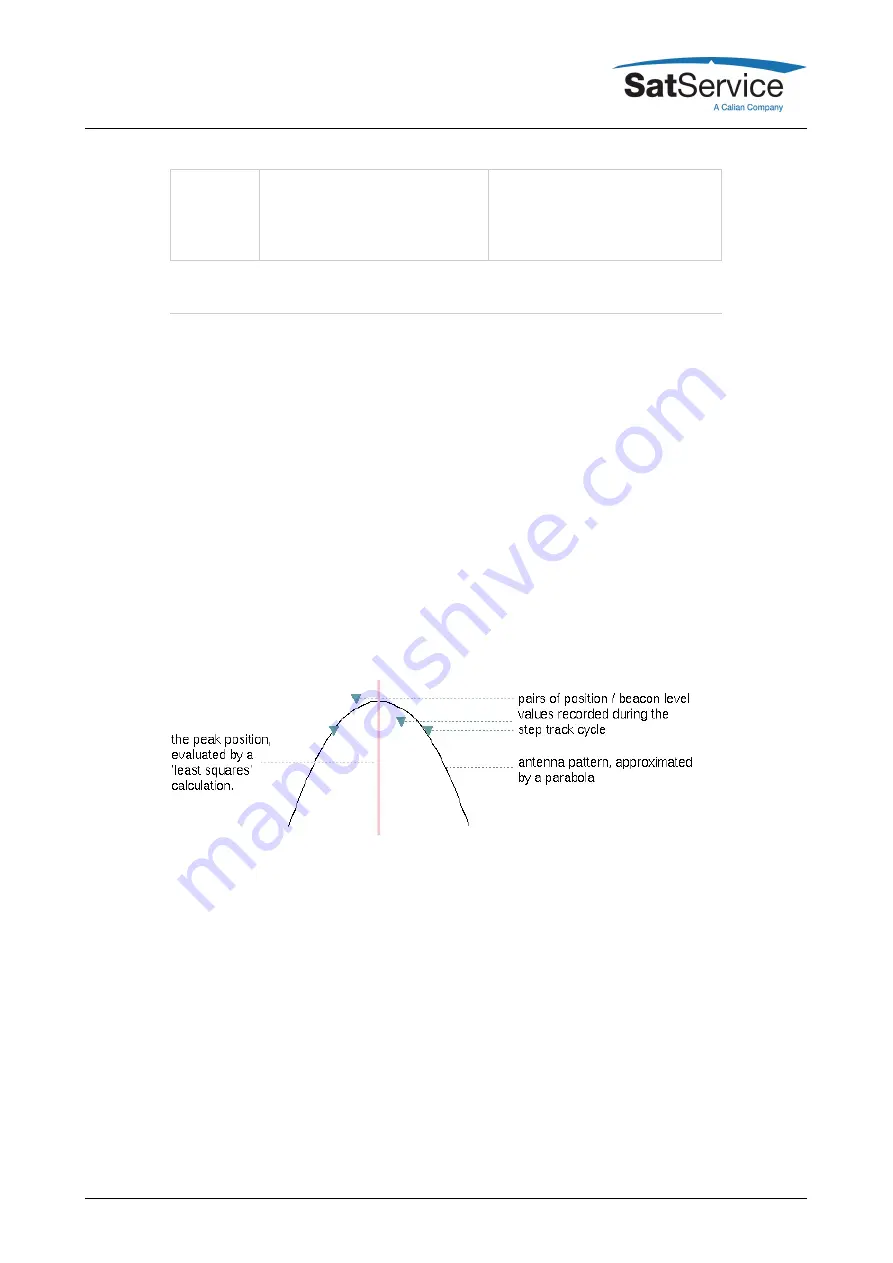
Within one step track cycle on one axis, the ACU does several very small steps. Using the
position and beacon level values of all steps in the cycle, the ACU calculates the peak position by
aligning the approximated antenna pattern to the measured points.
This method minimizes the impact of noise and measurement errors to the evaluated peak
position. The benefit is, that the size of depointing steps can be reduced to a very small value.
A tracking cycle consists of 2 .. 4 tests steps. With each step the antenna is moved a certain
angle increment, the beacon level is measured before and after the movement. The angle
increment is an adjustable value, expressed as a percentage of the antenna's 3dB beamwidth. A
typical value is 15% of the (half) beamwidth.
(C) 2022, SatService GmbH
www.satnms.com
ACU2-19V2-UM-2209 Page 85/99





















































