























Parameter Description | 7
0870208958_INVEOR_VFD_-0002_PCI_en
35 / 44
7.7.3 Stand-by Function in PID Process Control
7.7.3.1 Description
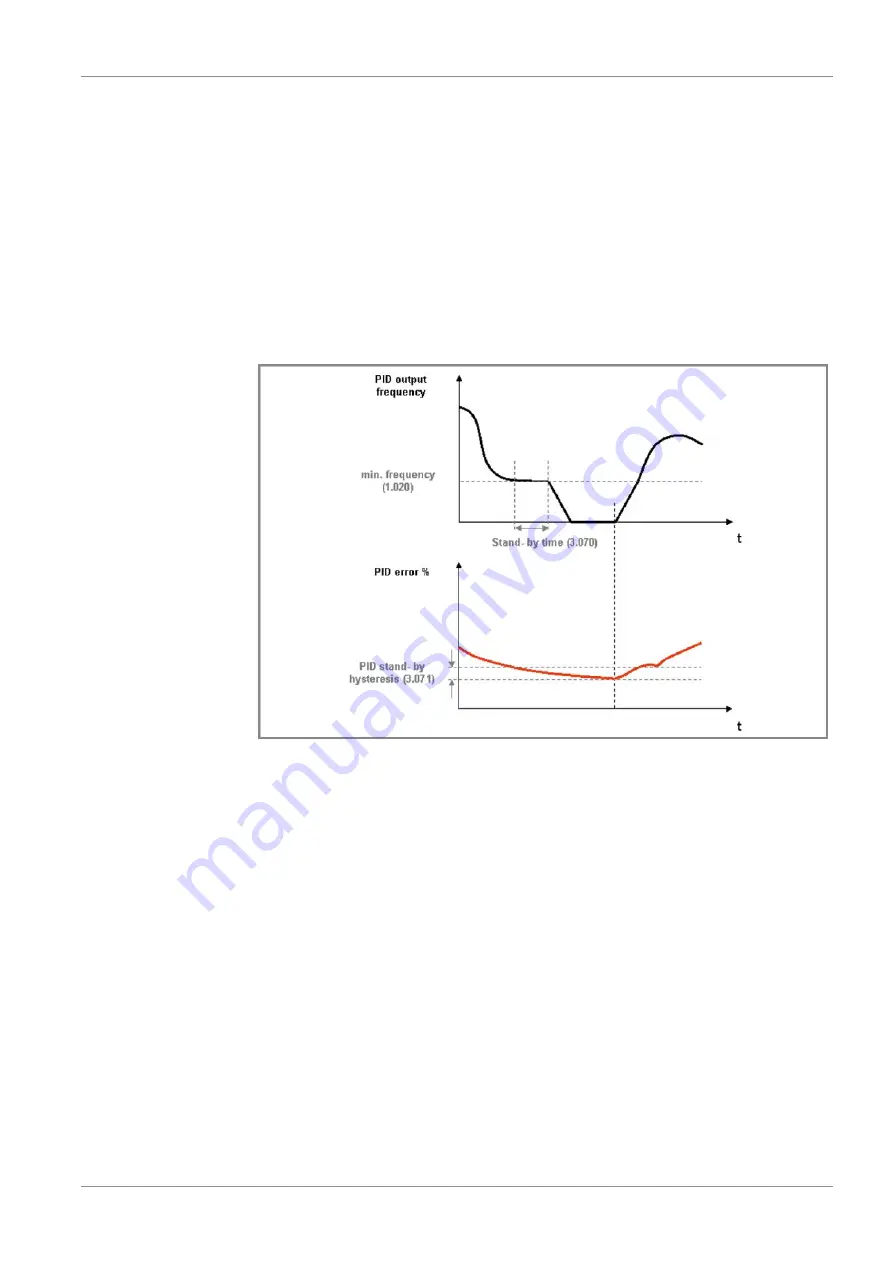
This function can provide energy savings in applications such as central vacuum systems
where PID process control is used to control to a specific process value and the pump has
to run at a “minimum frequency” (1.020). As the drive controller can reduce the rotation
speed of the pump in normal operation when the process variable is reducing, but it can
never fall below the “minimum frequency” (1.020), this provides an opportunity for
stopping the motor if it is running during a waiting time, the “PID stand-by
time” (3.070) with the “minimum frequency” (1.020).
Once the actual value deviates from the target value by the set % value, the “PID stand-
by hysteresis” (3.071), the control (the motor) is started again.
7.7.3.2 Change for PID Process Control
3.070 PID standby time
If the drive controller runs for the set time at its minimum frequency (parameter 1.020),
the motor is stopped (0 Hz).
Explanation of operating modes / fixed frequency
0 = disable
> 0 = waiting time until stand-by function is enabled
0 = default value to be adapt to your process
3.070 PID stand-by hysteresis
Condition for waking up the PID controller from stand-by.
Once the control difference exceeds the set value as %, the control begins again, see
also PID controller operating modes.
0 = default value to be adapt to your process