





















12
Series 70
Servo NXT - EtherNet/IP
Installation, Operation and Maintenance Manual
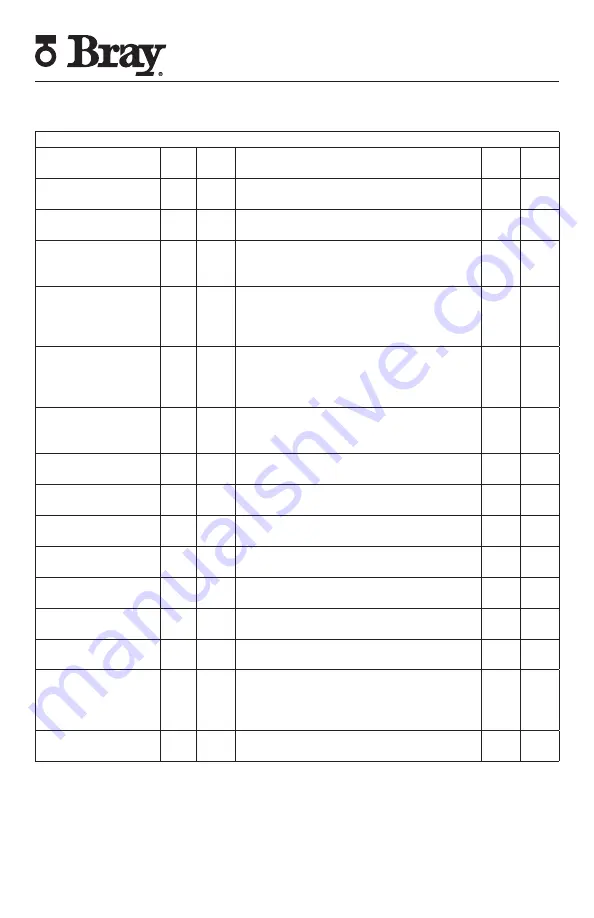
5.4.1 Input Assembly Data
Input Assembly Data
Variable
Data
Type
Size
(bits)
Notes
Start
Bit
Start
Byte
Feedback Position
REAL
32
Feedback position from S70 potentiometer.
Range: 0-100% (0-90°)
0
0
Motor Current
REAL
32
Current measured from the actuator motor
Range: 0-5.0 A
0
4
Control deviation
REAL
32
Difference between command position and
feedback position
Range: 0-100%, (0-90°)
0
8
Close Calibration
Offset
REAL
32
Offset between the closed limit switch and
the feedback travel limit. Determined during
autocalibration.
Range: 0-100%, (0-90°)
0
12
Open Calibration
Offset
REAL
32
Offset between the open limit switch and
the feedback travel limit. Determined during
autocalibration.
Range: 0-100%, (0-90°)
0
16
Response time
REAL
32
Time in seconds from change of command
position to initial change in feedback position
(positive values only)
0
20
Stroke Time
REAL
32
Time in seconds the last full stroke took to
complete (positive values only)
0
24
Motor Operating Time REAL
32
Time in hours that the motor has been
running (positive values only)
0
28
Energized Time
REAL
32
Time in hours that the Servo has been
powered (positive values only)
0
32
PST* Open Time -
Initial
REAL
32
Time in seconds to complete open direction
travel during the initial partial stroke test
0
36
PST* Close Time -
Initial
REAL
32
Time in seconds to complete close direction
travel during the initial partial stroke test
0
40
PST* Open Time - Last REAL
32
Time in seconds to complete open direction
travel during the last partial stroke test
0
44
PST* Close Time - Last REAL
32
Time in seconds to complete close direction
travel during the last partial stroke test
0
48
Direction changes
DINT
32
Number of times actuator moves in
the opposite direction of its previously
commanded direction of travel (positive values
only)
0
52
Full strokes
DINT
32
Number of full strokes completed (positive
values only)
0
56





















































