





























MPH-02, MPB-02, MPD-02
Master Communication
4-11
DOK-INDRV*-MP*-02VRS**-FK01-EN-P
Communication Phases According to SERCOS
Specification
Note:
For drives of the IndraDrive range the communication phases
according to SERCOS specification are valid for all kinds of
master communication. The only restriction is that for field bus
and parallel/analog interface only the communication phases
2, 3 and 4 are supported.
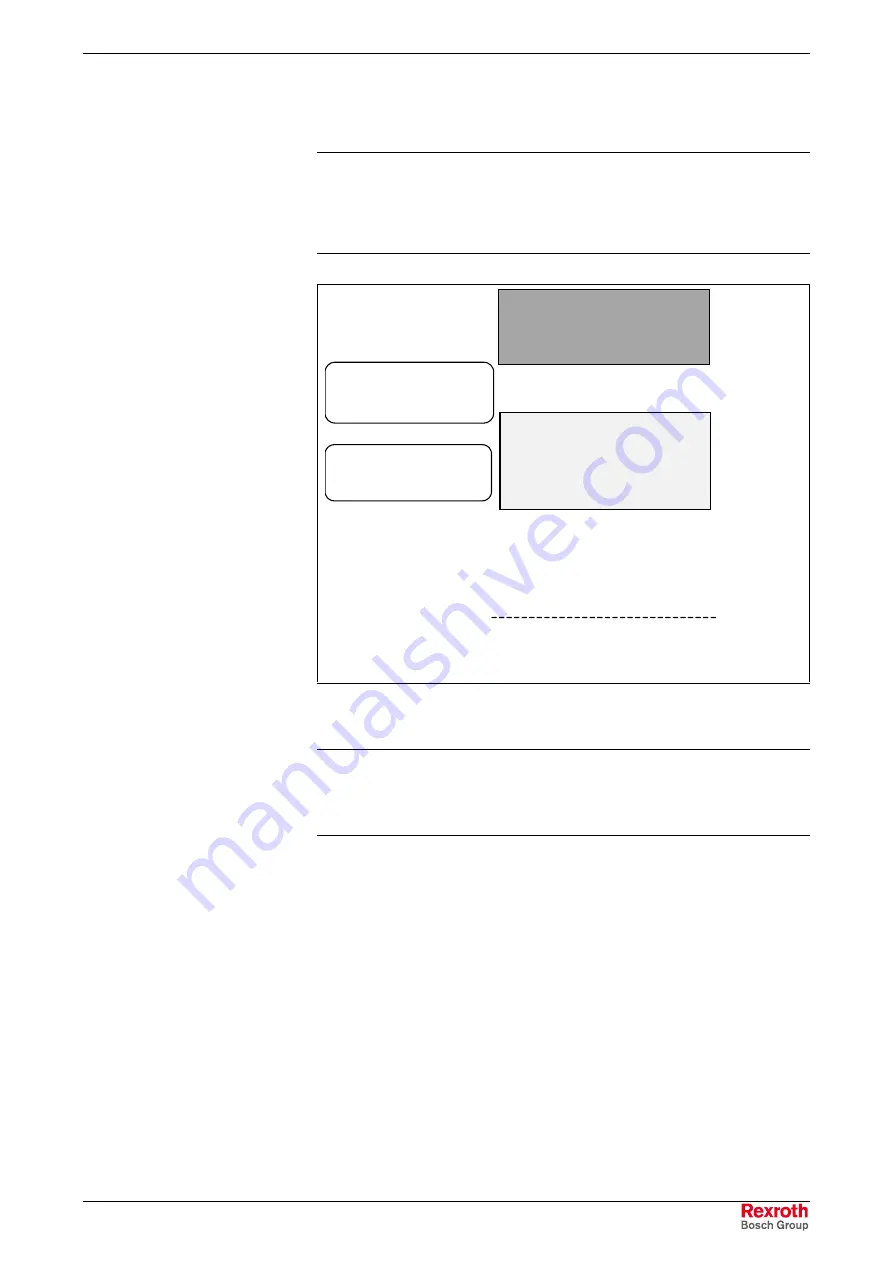
parameteriz.
mode
communication phase 1
communication phase 2
communication phase 3
communication phase 0
communication phase 4
operating
mode
transition check
command
phase 2 to 3
transition check
command
phase 3 to 4
communication phase
-1
Fig.
4-12:
Communication phases of the drive according to SERCOS
specification
Note:
The currently valid communication phase is contained in
parameter
S-0-0014, Interface status
(bit 0...2). For field bus
drives there also is the parameter
P-0-4078, Field bus: status
word
(bit 0, 1) for this purpose.
The individual phases (states) have the following functions:
•
P-1
: After it is switched on, the drive goes to phase –1 and carries out
a baud rate scan. As soon as the drive receives valid SERCOS
telegrams from the master, it changes to phase 0.
•
P0
: The master checks the SERCOS ring by sending synchronization
telegrams. During phase 0 communication between master and drive
isn't possible yet.
•
P1
: When the ring is closed, the master changes to phase 1 and
scans the slaves. In addition, it checks the configuration of the ring.
•
P2
: In phase 2 the complete drive parameterization can be carried out.
The following kinds of parameters
can only be changed in phase 2
:
•
communication parameters (according to SERCOS)
•
motor configuration parameters, holding brake parameters
•
encoder configuration parameters
•
mechanical transmission elements (gear, feed constant)
Courtesy
of
CMA/Flodyne/Hydradyne
▪
Motion
Control
▪
Hydraulic
▪
Pneumatic
▪
Electrical
▪
Mechanical
▪
(800)
426-5480
▪
www.cmafh.com







































































