





























Product overview
EL6601, EL6614
17
Version: 4.2
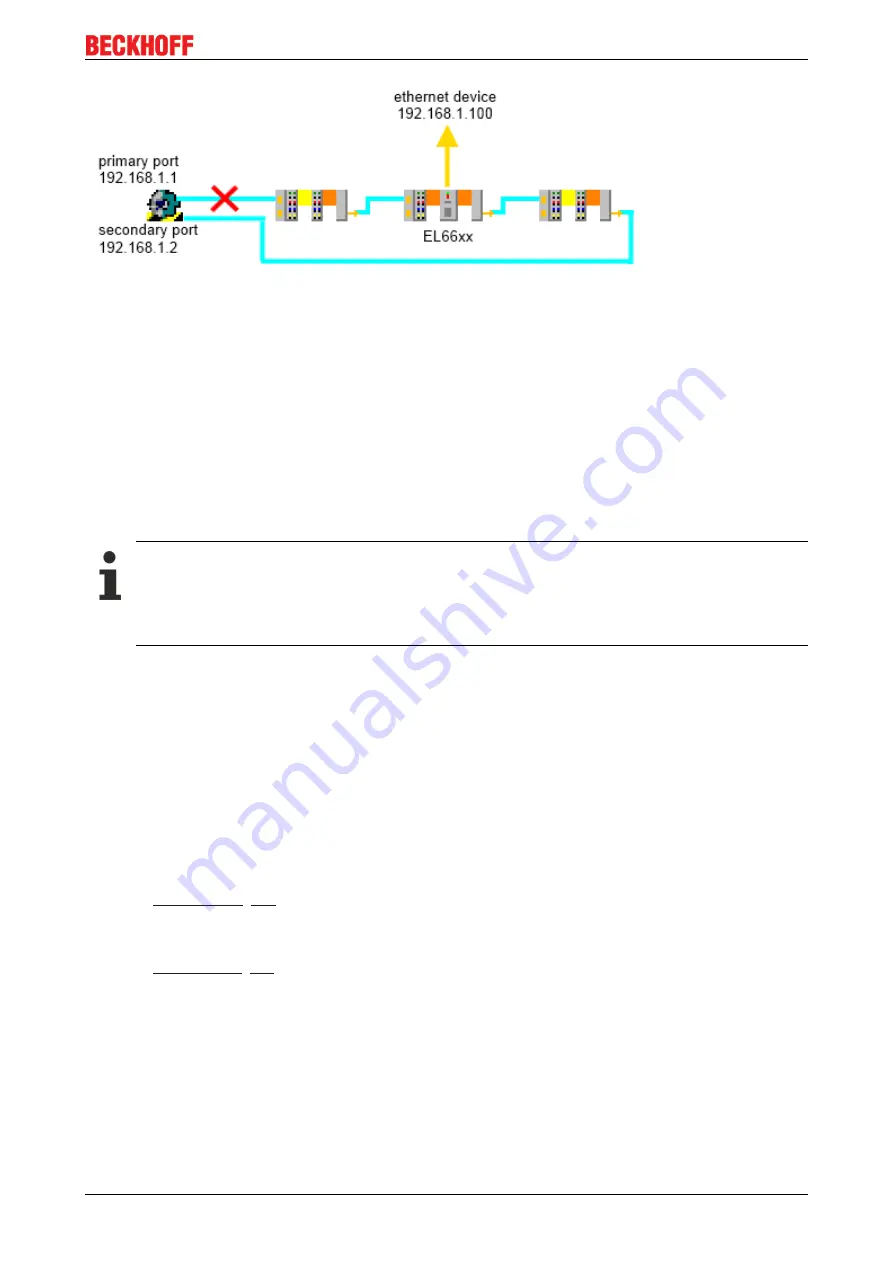
Fig. 13: Connection failure between primary EtherCAT port and 1
st
slave (X)
2.4
EL66xx - Non Realtime
EL66xx and Ethernet transport via mailbox communication
In addition to regular cyclical process data exchange an EtherCAT master offers a further mechanism for
transporting data to an EtherCAT slave or reading data from it. This mechanism is used for one-time or
dynamically alternating Data Exchange, such as e.g. the parameterization of an EtherCAT slave. Mailbox
communication can also be used for transporting large data blocks acyclically on request from master or
slave. This additional communication takes place between the cyclical process data frames (the conventional
EtherCAT frames) on the EtherCAT bus.
Data throughput in mailbox communication
Since mailbox communication can only take place between the regular process data frames, data
throughput with this communication method depends on the load of the EtherCAT bus. This means
that the Ethernet throughput of the EL6601 also depends on the load of the underlying EtherCAT
fieldbus.
The EoE method (Ethernet over EtherCAT) is used for the EL66xx. Dedicated settings are available for this
in the System Manager.
Data throughput
The data throughput of the EL66xx in Ethernet frames or bytes/second depends on
• The EtherCAT cycle time on the fieldbus: The shorter the EtherCAT cycle used for the process data,
the more acyclical mailbox queries can be completed. If several different EtherCAT cycle times are
used in an EtherCAT strand the fastest cycle time is the relevant time
• The time between the process data frames that is available for mailbox communication: The longer the
Ethernet line is free for acyclical mailbox communication, the higher the Ethernet data throughput of the
EL6601.
• The
in bytes: The larger the mailbox, the more Ethernet frames the EL6601 can
send to the EtherCAT master or received from it simultaneously.
• The number of terminals in the EtherCAT system that use mailbox communication at the same time.
• The
in the TwinCAT System Manager, see the EoE section.
The following values were determined as samples (TwinCAT 2.10, 2.11)
• > 5 Mbit/s from the EL6601 to the Ethernet device
• > 2 Mbit/s from the Ethernet device to the EL6601
with an EtherCAT cycle time of 100 µs and a mailbox size of 1024 bytes.





















































