





























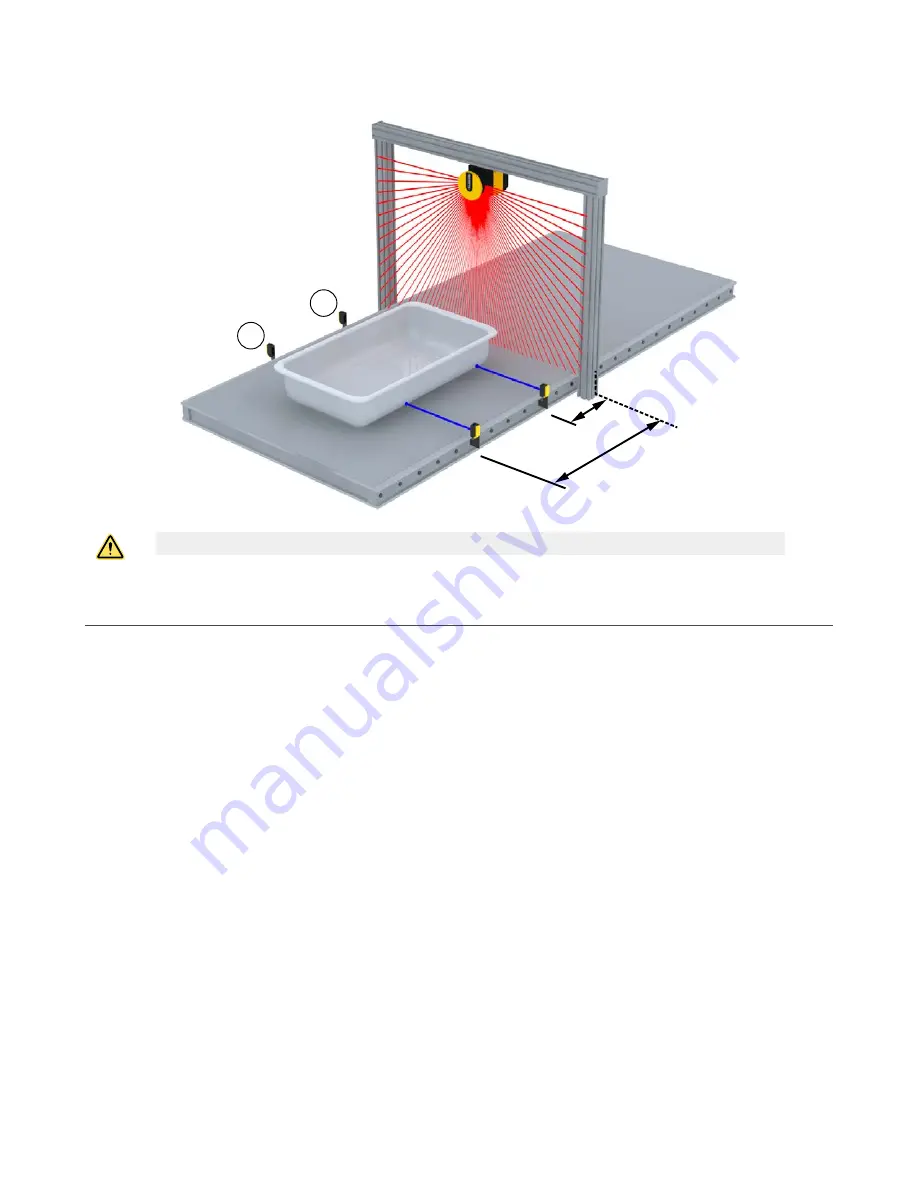
Figure 54. Muting function in the L configuration
M1
M2
D
A
CAUTION:
Unidirectional muting should only be used for removing materials from the dangerous area.
6.3 Encoder Functions
In mobile applications, the Safety Zone can change according to the position, direction, and speed of the vehicle. A typical
example is the use of the Safety Laser Scanner on an Automated Guided Vehicle (AGV). If the speed changes, the minimum
safety distance changes accordingly (the faster the movement, the longer the distance since the stopping time goes up).
To meet such requirements, the SX5-ME70 model is equipped with encoder inputs that allow measuring the actual speed of
the vehicle. Speed information is received from two independent encoders through high speed inputs supported by the 8-pin
connector (pins 4, 5, 6, and 8).
The scanner receives the signal sent by the encoders. The scanner uses these signals in conjunction with the Area Switch
inputs to select the appropriate Zone Set (as defined by the configuration) for the AGV situation and speed. To this end,
different Zone Sets must be configured so that each one will be activated by means of the area switch inputs and encoder
speed range. The number of available zone sets depends on the number of available inputs. The maximum number of zone
sets is 70.
When encoders are used in a configuration the following information is needed: Encoder Δ [%] and Encoder 1 / 2 [p/cm]
Encoder Δ [%]
—This is the allowable variation in the speed measures collected by Encoder 1 and Encoder 2. The minimum
value is 0%, the maximum value is 45%, the default value is 25%. To calculate the allowable variation for your application,
use the following formula:
((V
max
- V
min
)/V
min
) × 100 where
V
max
= Maximum speed
V
min
= minimum speed
If the Encoder Δ is exceeded, the OSSDs enter the OFF state to stop the vehicle. Exceeding the Encoder Δ is only allowed
within a certain time window, based on the vehicle speed:
•
If the vehicle speed is in the range between –10 cm/s and + 10 cm/s, the vehicle will not be stopped, regardless of
how long the Encoder Δ persists.
•
If the vehicle speed is in the range between –30 cm/s and -10 cm/s or +10 cm/s and +30 cm/s, the Encoder Δ can be
exceeded for a maximum of 60 seconds.
•
If the vehicle speed is in the range ≤ –30 cm/s or ≥ +30 cm/s, the Encoder Δ can be exceeded for a maximum of 20
seconds.
•
If the vehicle speed is in the range ≤ –10 cm/s or ≥ +10 cm/s, then different directions of rotation on the encoders are
only tolerated for a maximum of 0.4 second.
SX Safety Laser Scanner
74
www.bannerengineering.com - Tel: + 1 888 373 6767







































































