www.balluff.com
7
deutsch
3.1
Aufbau
Elektrischer Anschluss:
Der elektrische Anschluss ist
über eine Steckverbindung ausgeführt (siehe Typenschlüssel
auf Seite 17).
Gehäuse:
Aluminiumgehäuse, in dem sich der Wellenleiter
und die Auswerteelektronik befinden.
Positionsgeber:
Definiert die zu messende Position auf
dem Wellenleiter. Positionsgeber sind in unterschiedlichen
Bauformen lieferbar und gesondert zu bestellen (siehe
Nennlänge:
Um das BTL optimal an die Anwendung
anzupassen, sind Nennlängen von 50 mm bis 7620 mm
lieferbar.
3.2
Funktion
Im BTL befindet sich der Wellenleiter, geschützt durch ein
Aluminiumgehäuse. Entlang des Wellenleiters wird ein
Positionsgeber bewegt. Dieser Positionsgeber ist mit dem
Anlagenbauteil verbunden, dessen Position bestimmt
werden soll.
Der Positionsgeber definiert die zu messende Position auf
dem Wellenleiter.
Ein intern erzeugter INIT-Impuls löst in Verbindung mit dem
Magnetfeld des Positionsgebers eine Torsionswelle im Wel-
lenleiter aus, die durch Magnetostriktion entsteht und mit
Ultraschallgeschwindigkeit fortschreitet.
Die zum Ende des Wellenleiters laufende Torsionswelle
wird in der Dämpfungszone absorbiert. Die zum Anfang
des Wellenleiters laufende Torsionswelle erzeugt in einer
Abnehmerspule ein elektrisches Signal. Aus der Laufzeit
der Welle wird die Position bestimmt.
Diese Information wird über die EtherCAT
®
-Schnittstelle
übertragen. EtherCAT
®
ist ein industrielles Bussystem, das
auf der physikalischen Schicht des Ethernets basiert (siehe
www.ethercat.org).
Das BTL7 ist in der Lage bis zu 16 Positionsgeber zu
detektieren und zu verarbeiten. Die maximale Anzahl der
Positionsgeber ist abhängig von der Nennlänge. Zu jedem
Positionsgeber kann die Position und Geschwindigkeit
ausgegeben werden.
Die Konfiguration ist über die CoE-Schnittstelle möglich.
Folgende Konfigurationsmöglichkeiten stehen unter ande-
rem zur Verfügung:
– Anzahl der Positionsgeber. Feste Anzahl von 1 bis 16
oder flexibel (FMM). Im FMM entspricht die Magnetan-
zahl der detektierten Magnetanzahl, maximal 16
– Einstellen der Auflösung der Positions- und Geschwin-
digkeitsausgabe
– Setzen von Nockenschaltern
– Definieren von Arbeitsbereichsgrenzen
– Umkehrung der Messrichtung
– Konfiguration der Prozessdatenausgabe (Mapping)
Das BTL kann wahlweise asynchron oder mit Hilfe der
Distributed Clocks synchron betrieben werden.
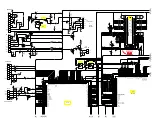
Bild 3-1: BTL7..., Aufbau
3
Aufbau und Funktion
50
40.6
68
41
36.8
~80
11.5
~80
~250
~250
15
8
83
73
2xM12
11.5
M8
1) Nicht nutzbarer Bereich
2) Nicht im Lieferumfang enthalten
3) Kerbe auf der Profiloberseite markiert den
Beginn des Messbereichs
1)
Nennlänge =
Messbereich
Positionsgeber
BTL5-P-3800-2
1)
Befestigungsklammern mit Isolierbuchsen
und Zylinderkopfschrauben ISO 4762 M5x22,
max. Anzugsdrehmoment 2 Nm
2)
2)
Nullpunkt
Kerbe 3)
Endpunkt
BTL7-V50E-M _ _ _ _ -P-C003
Magnetostriktives Positionsmesssystem – Bauform Profil
Summary of Contents for BTL7-V50E-M-P-C003 Series
Page 2: ...www balluff com...
Page 3: ...BTL7 V50E M_ _ _ _ P C003 Betriebsanleitung deutsch...
Page 4: ...www balluff com...
Page 22: ......
Page 23: ...BTL7 V50E M_ _ _ _ P C003 User s Guide english...
Page 24: ...www balluff com...
Page 42: ......
Page 43: ...BTL7 V50E M_ _ _ _ P C003 Notice d utilisation fran ais...
Page 44: ...www balluff com...
Page 62: ......
Page 63: ...BTL7 V50E M_ _ _ _ P C003 Manuale d uso italiano...
Page 64: ...www balluff com...
Page 82: ......
Page 83: ...BTL7 V50E M_ _ _ _ P C003 Manual de instrucciones espa ol...
Page 84: ...www balluff com...