8
english
3
Construction and function (continued)
3.2
Function
The BTL contains the waveguide which is protected by an
outer stainless steel tube (rod). A magnet is moved along
the waveguide. This magnet is connected to the system
part whose position is to be determined.
The magnet defines the position to be measured on the
waveguide.
An internally generated INIT pulse interacts with the
magnetic field of the magnet to generate a torsional wave
in the waveguide which propagates at ultrasonic velocity.
The component of the torsional wave which arrives at the
end of the waveguide is absorbed in the damping zone to
prevent reflection. The component of the torsional wave
which arrives at the beginning of the waveguide is
converted by a coil into an electrical signal. The position is
determined from the propagation time of the wave. The
position value corresponds to the travel time of the
torsional wave and is output as digital time information
between the start and stop pulses. Depending on the
version this output signal is available redundant on 2 or 3
independent measuring units.
Redundant magnetostrictive linear position sensors contain
– depending on the version – two or three independent
measuring units in the same housing, whose channels are
not synchronized internally. If only one channel is used (the
second or third channels are only substitute channels), a
high level of precision and a high resolution are easy to
achieve.
If two or three channels are used simultaneously and a
high output resolution is also required, the measurements
on each channel must take place as simultaneously as
possible. This is due to the fact that even though the
redundant system has completely independent measuring
units with independent waveguides, a current pulse that
triggers the measurement on one channel can also
influence the torsional waves of the other channels and
thus cause position jumps at the output of the sensor.
This influence can be avoided if the measurement is
started simultaneously on each channel by synchronizing
the Init signals of each channel with each other.
The evaluation may relate to the rising or falling edge. This
is done with a high level of precision and reproducibility
within the measuring range indicated as the nominal
length.
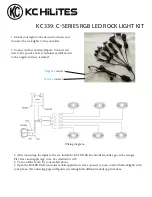
Fig. 3-2:
T
T
Start
Stop
Init
Time/distance measuring principle
3.3
Number of magnets
Up to 16 magnets can be used. The distance (L) between
the magnets must be at least 65 mm.
Fig. 3-3: Distance between the magnets
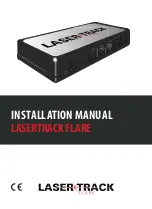
3.4
LED display
Fig. 3-4: Location of the
LED
LED indicator on BTL7
The respective LED shows the operating status
of the corresponding measuring unit.
LED
Operating state
Green
Normal function
Magnet is within the limits.
Red
Error
No magnet or magnet outside the limits.
Flashing
red
Init error
Missing or no valid Init signal.
Tab. 3-1: LED display
BTL7-P511-M _ _ _ _ -T _ 2/3-S32/KA _ _ /FA _ _
Magnetostrictive Linear Position Sensor – Rod Style
Summary of Contents for BTL7-P511-M Series
Page 2: ...www balluff com...
Page 4: ...www balluff com...
Page 24: ......
Page 26: ...www balluff com...
Page 46: ......
Page 48: ...www balluff com...
Page 68: ......
Page 70: ...www balluff com...
Page 90: ......
Page 92: ...www balluff com...