





























V4.5
©2015-2019 AUBO.All rights reserved.
104
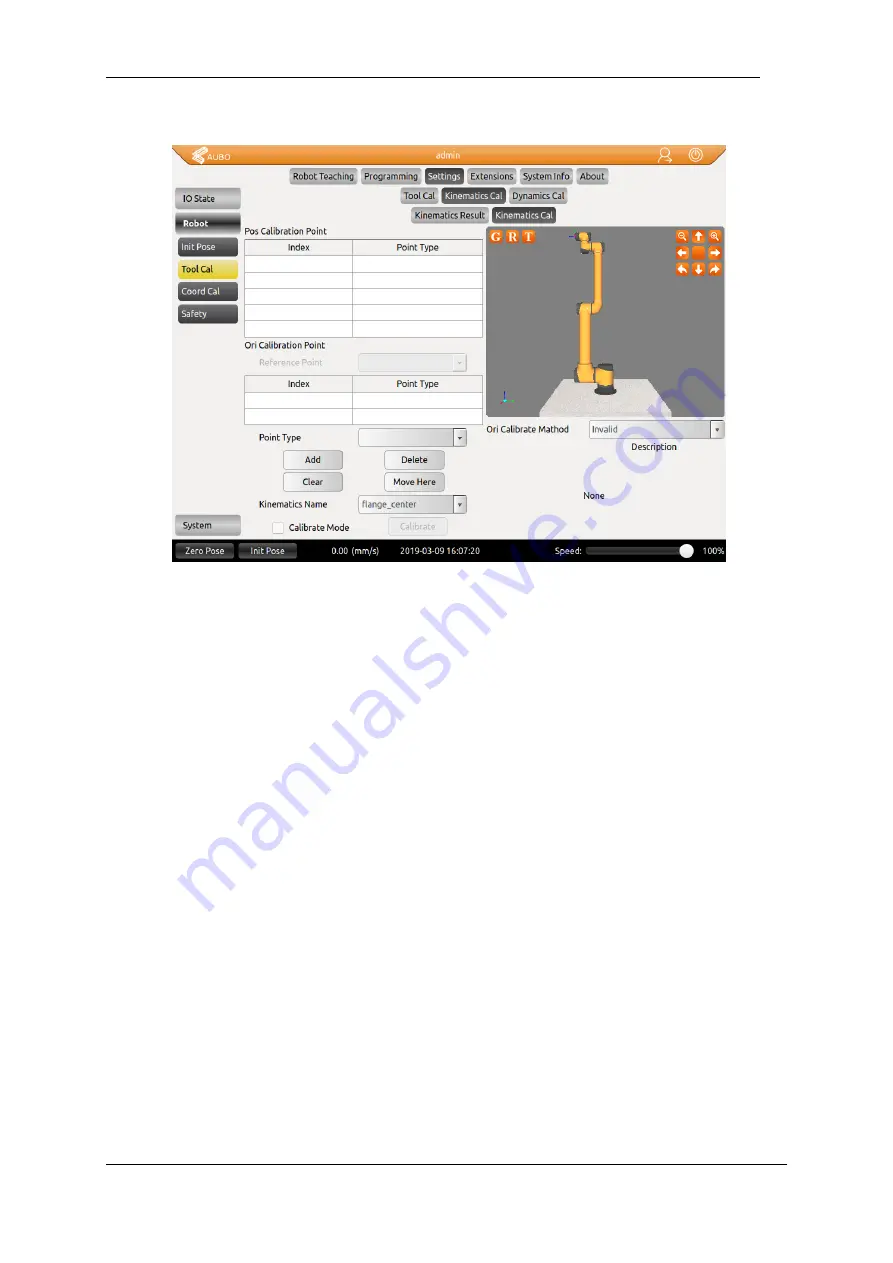
Tool Kinematics Calibraton
Figure 10-23 Tool Kinematics Calibraton
The tool kinematics calibration consists of two interfaces. The figure above is the tool kinematics point
selection interface. Tool kinematics parameters consist of end-effector position parameters and orientation
parameters. Calibration position parameters need to be greater or equal to 4 waypoints, and calibration
orientation parameters need to have only two waypoints.
The position calibration needs to add a position reference point (used as the origin of the end tool when
calibrating the orientation). Before calibrating the kinematic parameters of the tool, make sure that the arm
has been installed with the tool. First, calibrate the reference position, select the Point Type as Pos
Calibration, click the Add button to enter the teaching interface, and calibrate the reference position by
hand guiding or teaching interface. Position calibration requires at least 4 waypoints to determine the
parameters. After that, you only need to change the orientation and then add three waypoints while keeping
the reference point (the end tool relative to the coordinate system of the base) unchanged. At the final
calibration of the 4 waypoints, ideally the center point of the 4 waypoints is on the sphere center and in the
middle of the true end of the tool.
The orientation calibration needs to calibrate the reference position (ie, the first point of position
calibration). The principle of orientation calibration is that the reference position is the origin of the end
tool coordinate system. The ray formed by the origin and the first orientation calibration point is the
positive half-shaft of X-axis, the ray formed by the origin and the second orientation calibration point is
the positive haft-shaft of Y-axis, ensure that the angle formed by the three waypoints is at right angles.
During the calibration process, move to the reference position first, select Point Type as Ori Calibration,
and click Add to enter the teaching interface, calibrate the first orientation point. Using the same method to
calibrate the second pose point, be sure to make sure that the angle formed by the three points is a right
angle. Here you can use the position movement on the teach interface to help calibrating the orientation
point.
Summary of Contents for AUBO-i10
Page 1: ...USER MANUAL AUBO i10 CB4 Please read this manual carefully before using the product...
Page 2: ......
Page 10: ...V4 5 2015 2019 AUBO All rights reserved vi...
Page 26: ...V4 5 2015 2019 AUBO All rights reserved 22...
Page 44: ...V4 5 2015 2019 AUBO All rights reserved 40...
Page 56: ...V4 5 2015 2019 AUBO All rights reserved 52...
Page 87: ...V4 5 2015 2019 AUBO All rights reserved 83...
Page 127: ...V4 5 2015 2019 AUBO All rights reserved 123...
Page 161: ...V4 5 2015 2019 AUBO All rights reserved 157 Figure 11 43 script file editor...
Page 179: ......