




























Commissioning
Instruction manual 91/104 V9.2
5.5.1 Resolver card 01/324
This card makes it possible to connect a resolver to 2 or more poles on the X14 connector and to use it to control the motor.
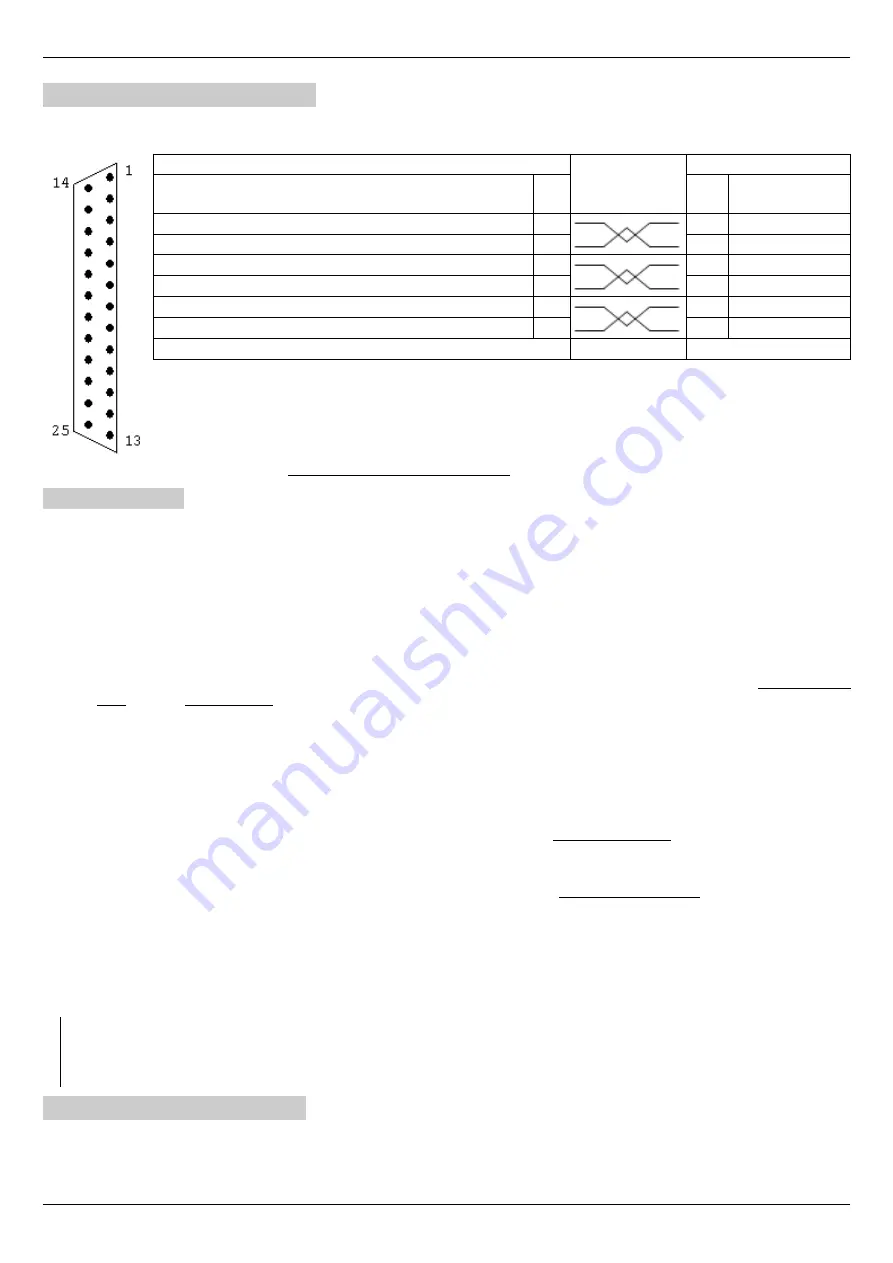
Assigning connector PINs:
DRIVE (Connector X14)
CONNECTION
MOTOR
SIGNAL
N.
PIN
N.
PIN
SIGNAL
Input sine+ (terminal 1 of the secondary winding 1)
19
Input sine-(terminal 2 of the secondary winding 1)
20
Input (terminal 1 of the secondary winding 2)
21
Input Cosine- (terminal 2 of the secondary winding 2)
22
Output Resolver supply (terminal 1 of the first winding)
23
Output Resolver 0V (terminal 2 of the first winding)
24
0V (cable shield) – Connector case
View connector from the soldering side (Connector type “D " 25 pole female).
5.5.1.1 Settings
Follow these points for proper commissioning of the transducer card:
1. Check that the X4 connector has no connection.
2. Plug the transducer connector onto X14.
3. Provide service power to the drive and perform all standard settings (paragraph "Calibration and adjustments“ on page 57
and paragraph "Setting motor parameters“ on page 57).
4. Navigate the drive menu to the “Quick setup → Motor Parameters → Feedback Type " parameter. Use the keys to change
setting and select “Resolver ". If you cannot select this transducer, see step 6 just ahead to check if the card is working prop-
erly.
5. Scroll through the menu to the parameter “Quick setup → Motor Parameters → Resolver Pole Pair ". Set the number of pol
e
pairs resolver. ATTENTION: the number of “pole pairs " is half the number of “poles" of the resolver; generally, the number
of poles is indicated on the plate, so the data to be set in this parameter is half the value written on the plate.
6. Check if the card is compatible and if it has been recognised by moving to the menu “Diagnostic → Transduc. Board →
Transduc. Board for...." and verify that the words "Resolver" are present. If this does not occur, please contact the ALTER
Technical Office for some verifications.
7. Check the amplitude of the signals and the connection of the electrical wires of the transducer by moving to the menu "Dia -
gnostic → Transduc. Board → Resolver Signal" and verify that there is "OK", otherwise make these adjustments:
◦
Written “LOW ": Rotate the trimmer next to the X14 connector in the clockwise
direction
, until the inscription changes
and becomes “OK ". If you reach the trimmer limit switch and the writing remains unchanged, you must check the cable
connections to the resolver or the compatibility of the signal with the card.
◦
Written “HIGH”: Rotate the trimmer next to the X14 connector in the anticlockwise direction little at a time, until the
inscription changes and becomes “OK”. If you reach the trimmer limit switch and the writing remains unchanged, you
must check the cable connections to the resolver or the compatibility of the signal with the board.
8. IIf all previous verifications are positive, autotune of motor parameters can be performed as explained in paragraph
”Autotune for the calculation of optional parameters“ on page 58.
9. At the end of the autotune procedure, the parameters must be stored in order to complete the commissioning of the transducer
card.
NOTE:
Using a resolver with 4 or more poles you get 2 or more sinusoids per revolution of the motor. For this reason the signal of
the Simulated Encoder or that of the motor position are referred to the single sinusoid. For example, with a 6-pole resolver you get
3 sinusoids per motor revolution; so if the simulated encoder is set to 1024 PPR (pulse/revolution) you will actually get 1024 x 3 =
3072 Impulses per motor lap, and 3 pulses of passage over zero (ZERO tick).
5.5.2 Sin-Cos card 01/325
This card makes it possible to connect a sinusoidal encoder on the X14 connector and to use it to control the motor.
Assigning connector PINs:
60
Alter Elettronica s.r.l.