The RN50 has a Molex Nano-Fit 105310 series connector. This connector is provided with
each purchase. Only use provided NextCore cabling when powering the payload. API
connections only apply to the A3 API auto-capture feature of the product. If this feature is not
desired then use only the power connector and not the dual power and API connector.
Note: Attaching a connector with the incorrect pinout can cause permanent damage to the
system.
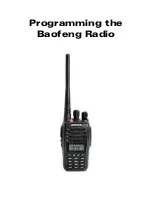
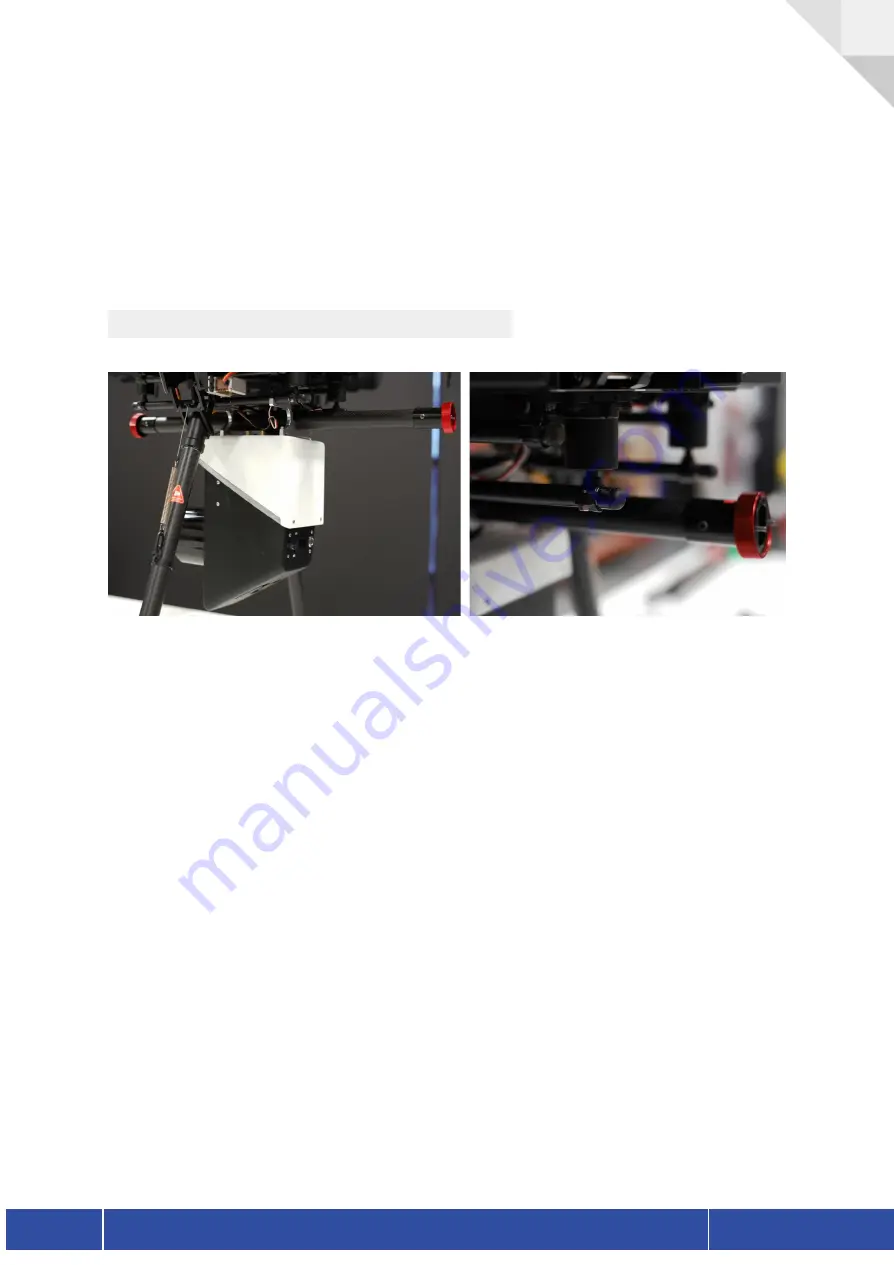
6.6 Mounting the payload to an M600
To attach the unit to the M600 using the 12mm rails provided in the mounting kit. This will fit
into the vibration isolators circular opening. The best practice is to undo all clamps, insert one
side of the payload into the vibration isolators and then slide forward them back into the
opposite side. Once the payload is within the vibration isolators centre the payload so that the
small indicator lines on the 12mm tube rails fit within the circular clamps. Make sure to tighten
the vibration isolator clamps on all four corners. Apply thread locker to these to ensure that
the vibrations caused by the UAV will not loosen the screws.
Version 1.1
NextCore RN50 User Guide
14
Summary of Contents for NextCore RN50
Page 1: ......