128
Motion Control Theory
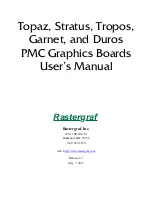
2.
Step mode:
In addition to velocity parameters this
mode requires specific offset and so is easy for stop
position prediction. After the JOG-ON control signal is
triggered at the rising edge, the axis being controlled
moves a distance of given offset then stops, pauses for a
period of time (known as the delay time), if the control
signal remains ON in delay time, the control axis moves
in given speed profile until the signal disappears. It
differs from continuous mode in that the total
displacement will be increased to integer times of given
offset value. This is useful in achieving more precise
offset control during fine tuning.
Figure 4-31: Jog step mode
• JOG-ON and digital input signal linkage:
The JOG-ON control signal not only can be given with API function
but also can be used in setting digital input signal as control signal.
You may set up axis parameter 48h, 49h, 4Ah, and 4Bh in two
methods (distinguished by number of DI points):
1. Use two DI channel and set one of it to positive direction
movement JOG-ON signal and the other to negative direction
movement JOG-ON signal
2. Use one DI channel and set it to JOG-ON signal with its
direction to be determined by axis parameter.
Relevant APS API described below:
I32 APS_jog_on (…);
// give velocity movement command
OFF(0)
ON(1)
offset offset
offset
T
V
JOG-ON
offset
offset
delay time
delay time
signal
Summary of Contents for PCI-8254
Page 2: ...ii Revision History Revision Date Description 2 00 2014 08 13 First release ...
Page 8: ...viii Table of Contents Important Safety Instructions 209 Getting Service 211 ...
Page 12: ...xii List of Figures ...
Page 14: ...xiv List of Tables ...
Page 24: ...10 Introduction ...
Page 54: ...40 Getting Start with The Installation ...
Page 78: ...64 Signal Connection ...
Page 111: ...Motion Control Theory 97 PCI 8254 PCI 8258 MCP2 Bode plot page ...
Page 222: ...208 Motion Control Theory ...