



























7.12.2.1
Low pass filtering
In order to minimize the influence of the noise signal on the measurement it is possible
to introduce the recursive, low pass filtering of the measured values for S (P, Q). This
will make slower measurement response to the step changes in the measured quantity.
Filtering is performed in accordance with the following recursive formula:
(
)
Old
Calculated
S k S
1 k S
= ×
+ -
×
EQUATION1959 V1 EN
(Equation 116)
Where
S
is a new measured value to be used for the protection function
S
old
is the measured value given from the function in previous execution cycle
S
Calculated
is the new calculated value in the present execution cycle
k
is settable parameter by the end user which influence the filter properties
Default value for parameter
k
is
0.00
. With this value the new calculated value is
immediately given out without any filtering (that is, without any additional delay).
When
k
is set to value bigger than 0, the filtering is enabled. A typical value for
k =
0.92
in case of slow operating functions.
7.12.2.2
Calibration of analog inputs
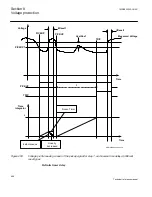
Measured currents and voltages used in the Power function can be calibrated to get
class 0.5 measuring accuracy. This is achieved by amplitude and angle compensation at
5, 30 and 100% of rated current and voltage. The compensation below 5% and above
100% is constant and linear in between, see example in figure
.
Section 7
1MRK505222-UUS C
Current protection
482
Technical reference manual
Summary of Contents for Relion 670 series
Page 1: ...Relion 670 series Line differential protection RED670 ANSI Technical reference manual...
Page 2: ......
Page 40: ...34...
Page 50: ...44...
Page 60: ...54...
Page 126: ...120...
Page 384: ...378...
Page 496: ...490...
Page 556: ...550...
Page 602: ...596...
Page 620: ...614...
Page 794: ...788...
Page 864: ...858...
Page 988: ...982...
Page 998: ...992...
Page 1084: ...1078...
Page 1164: ...1158...
Page 1168: ...1162...
Page 1220: ...1214...
Page 1230: ...1224...
Page 1231: ...1225...