





























The
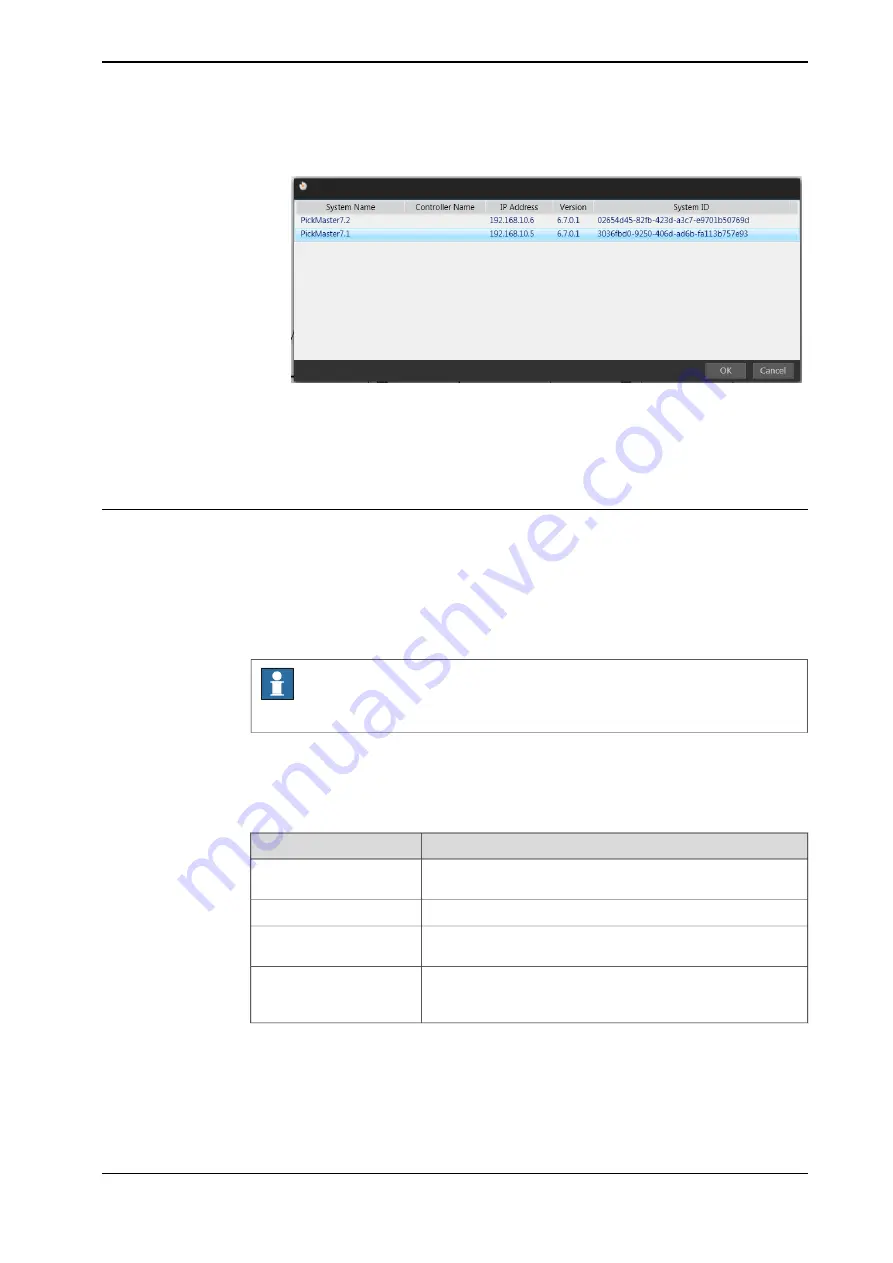
Select Real Controller
dialog is opened.
xx1800001715
3 In the dialog box, choose the real controller to be connected.
4 Click
OK
to apply the configuration.
5 Click
Close
to close the
Edit Controller
dialog.
Configuring the I/O
I/O signals
I/O signals are configured using RobotStudio or the FlexPendant. Then they can
be used from Runtime.
The predefined signals can be used without modifications. Edit the predefined
signals or add additional signals if needed.
Note
The maximum name length for a work area signal is 15 characters.
Predefined I/O signals
The following I/O signals are predefined on delivery. Some of them are used or
referenced to when configuring the line. The encoder signals are described in
Application manual - Conveyor tracking
.
Description
I/O signal name
Digital input signals for custom use, such as generating I/O
triggered position or checking a gripper pressure switch.
diX_1
Digital output for starting/stopping conveyors.
doStartCnvX
Digital output for triggering an image acquisition. This signal
is used by Runtime to order the camera to acquire an image.
doTrigVisX
Digital output used for triggering predefined positions in a
conveyor work area. This output should be connected to the
StartSig
(input 9) on the corresponding encoder board.
doManSyncX
Continues on next page
Application manual - PickMaster® Twin - PowerPac
177
3HAC064218-001 Revision: B
© Copyright 2021 ABB. All rights reserved.
4 Working with PickMaster PowerPac
4.3.1 Switching to real Runtime
Continued
Summary of Contents for PickMaster Twin - PowerPac
Page 1: ...ROBOTICS Application manual PickMaster Twin PowerPac ...
Page 8: ...This page is intentionally left blank ...
Page 12: ...This page is intentionally left blank ...
Page 16: ...This page is intentionally left blank ...
Page 420: ...This page is intentionally left blank ...
Page 444: ...This page is intentionally left blank ...
Page 446: ...This page is intentionally left blank ...
Page 448: ...This page is intentionally left blank ...
Page 452: ......
Page 453: ......