





























Base frame calibration can be done with any robot, but only on one of the robots.
Note
If robot 1 (
ROB_1
) is selected, you cannot do the base frame calibration between
robot 2 (
ROB_2
) and positioner.
Note
Action
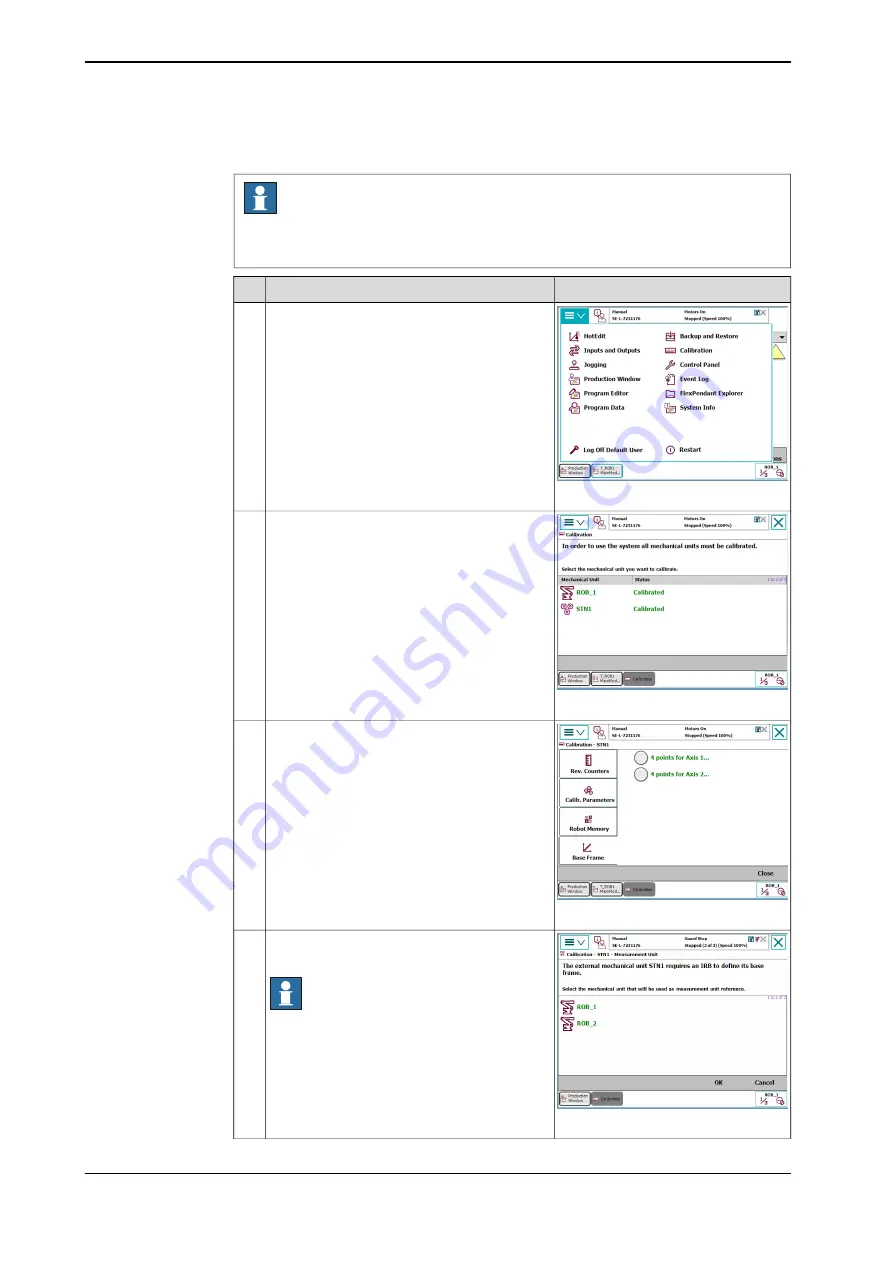
xx1800000751
On the FlexPendant, select
Calibration
.
1
xx1800000752
Select Mechanical Unit
STN1
.
2
xx1800000753
Select
Base Frame
and then select which
points to calibrate.
The number of axes and points to calibrate
differ depending on positioner variant.
IRBP A, IRBP B, IRBP D:
4 points for Axis 1
or
4 points for Axis 2
. (Both axes need to be
calibrated. Choose axis 1 first and run the
complete procedure according to the following
steps. When done, repeat the procedure for
axis 2, keeping axis 1 at 0° meanwhile.)
IRBP K, IRBP L, IRBP R:
4 points Z
3
xx1800000785
Select the robot you will use to measure the
base frame.
Note
If robot 1 (
ROB_1
) is selected you cannot do
the base frame calibration between robot 2 and
positioner.
4
Continues on next page
278
Product manual - IRBP /D2009
3HAC037731-001 Revision: T
© Copyright 2010-2020 ABB. All rights reserved.
8 Calibration information
8.7.2 Calibrating the multi-arc system
Continued
Summary of Contents for IRBP
Page 1: ...ROBOTICS Product manual IRBP D2009 ...
Page 38: ...This page is intentionally left blank ...
Page 70: ...This page is intentionally left blank ...
Page 250: ...This page is intentionally left blank ...
Page 264: ...This page is intentionally left blank ...
Page 314: ...This page is intentionally left blank ...
Page 330: ...This page is intentionally left blank ...
Page 333: ......




































































