





























3 Repair activities, manipulator
3.1.1 Removal of cable harness
24
A
3HAC 16247-1
Section 3.1: Complete manipulator
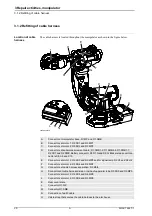
3.1.1 Removal of cable harness
Location com-
plete cable har-
ness
The cable harness is located throughout the manipulator as shown in the figure below.
xx0200000210
A
Connector at manipulator base, R1.MP and R1.SMB
B
Connectors at motor 1; R2.FB1 and R2.MP1
C
Connectors at motor 2; R2.FB2 and R2.MP2
D
Connectors at serial measurement board; R1.SMB1-3, R1.SMB4-6, R1.SMB1.7,
R2.FB7 and R2.SMB. Battery connector X3 R1.G and R2.G. Connectors at brake
release unit X8, X9 and X10.
E
Connectors at motor 3; R2.FB3 and R2.MP3 and for signal lamp R2.H1 and R2.H2
F
Connectors at motor 4; R2.FB4 and R2.MP4
G
Connectors at cable harness separation; R2.M5/6
H
Connectors at cable harness division, inside of upper arm tube; R3.FB5 and R3.MP5.
Connectors at motor 5; R4.FB5 and R4.MP5.
J
Connectors at motor 6; R3.FB6 and R3.MP6
K
Rear cover plate
L
Connector R1.MP
M
Connector R1.SMB
N
Connection of earth cable
O
Velcro strap that secures the cable harness to the arm house
A
B
C
D
E
F
G
H
J
K
O
L
M
N
Summary of Contents for IRB 6600 - 175/2.55
Page 2: ......
Page 6: ...Product Specification IRB 6600 2 Product Specification IRB 6600 M2000 ...
Page 82: ...Specification of Variants and Options 78 Product Specification IRB 6600 M2000 ...
Page 84: ...Accessories 80 Product Specification IRB 6600 M2000 ...
Page 116: ...Description 30 Product Specification S4Cplus M2000 BaseWare OS 4 0 ...
Page 136: ...Specification of Variants and Options 50 Product Specification S4Cplus M2000 BaseWare OS 4 0 ...
Page 140: ...Index 54 Product Specification S4Cplus M2000 BaseWare OS 4 0 ...
Page 141: ...Product Specification RobotWare Options 3HAC 9218 1 Rev 2 BaseWare OS 4 0 ...
Page 146: ...Introduction 4 Product Specification RobotWare Options for BaseWare OS 4 0 ...
Page 201: ...Installation Manual IRB 6600 6650 M2000A 3HAC 16245 1 Revision A ...
Page 218: ...1 Safety service 1 3 7 Work inside the manipulator s working range 16 A 3HAC 16245 1 ...
Page 237: ...4 On site Installation 3HAC 16245 1 A 35 Chapter 4 On site Installation ...
Page 277: ...5 Electrical connections 3HAC 16245 1 A 75 Chapter 5 Electrical connections ...
Page 376: ...9 System directory structure 9 0 5 Handling mass memory storage capacity 174 A 3HAC 16245 1 ...
Page 406: ...10 Calibration 10 5 5 Retrieving offset values 204 A 3HAC 16245 1 ...
Page 410: ......
Page 411: ...Repair Manual part 1 IRB 6600 6650 M2000A 3HAC 16247 1 Revision A ...
Page 416: ...Table of Contents iv 3HAC 16247 1 ...
Page 418: ...0 0 1 Overview 2 A 3HAC 16247 1 ...
Page 428: ...1 Safety service 1 3 7 Work inside the manipulator s working range 12 A 3HAC 16247 1 ...
Page 570: ...3 Repair activities manipulator 3 6 8 Refitting of gearbox axis 6 154 A 3HAC 16247 1 ...
Page 616: ...5 Appendix 1 Part Lists 5 1 15 Arm extension set 450 mm 3HAC 12311 5 200 A 3HAC 16247 1 ...
Page 618: ...6 Appendix 2 Foldouts 6 0 1 Introduction 202 A 3HAC 16247 1 ...
Page 620: ...6 Appendix 2 Foldouts 6 0 2 Base incl Frame 204 A 3HAC 16247 1 ...
Page 622: ...6 Appendix 2 Foldouts 6 0 3 Frame Lower arm 1 206 A 3HAC 16247 1 ...
Page 624: ...6 Appendix 2 Foldouts 6 0 4 Frame Lower arm 2 208 A 3HAC 16247 1 ...
Page 626: ...6 Appendix 2 Foldouts 6 0 5 Upper arm 210 A 3HAC 16247 1 ...
Page 628: ...6 Appendix 2 Foldouts 6 0 6 Wrist complete 212 A 3HAC 16247 1 ...
Page 630: ......
Page 631: ...Maintenance Manual IRB 6600 6650 M2000A 3HAC 16246 1 Revision A ...
Page 636: ...0 0 1 Overview 2 A 3HAC 16246 1 ...
Page 646: ...1 Safety service 1 3 7 Work inside the manipulator s working range 12 A 3HAC 16246 1 ...
Page 740: ...6 Maintenance activities controller cabinet 6 3 5 Cleaning Drain filter 106 A 3HAC 16246 1 ...
Page 742: ......
Page 743: ...Repair Manual part 2 Circuit Diagrams IRB 6600 6650 M2000A 3HAC 16247 1 Revision A ...
Page 746: ...0 0 1 Overview 2 A 3HAC 16247 1 ...
Page 748: ......
Page 749: ...Revision No of sheets sheet 20 Circuit Diagram 3HAC 13347 1 Contents 101 01 ...
Page 750: ......
Page 751: ...Revision No of sheets sheet 20 Circuit Diagram 3HAC 13347 1 Connection Point Location 102 01 ...
Page 752: ......
Page 753: ...Revision No of sheets sheet 20 Circuit Diagram 3HAC 13347 1 Legend 103 01 ...
Page 754: ......
Page 755: ...Revision No of sheets sheet 20 Circuit Diagram 3HAC 13347 1 Brake Release Unit 104 01 ...
Page 756: ......
Page 758: ......
Page 759: ...Revision No of sheets sheet 20 Circuit Diagram 3HAC 13347 1 Serial Measurement Board 105 01 ...
Page 760: ......
Page 761: ...Revision No of sheets sheet 20 Circuit Diagram 3HAC 13347 1 Axis 1 106 01 ...
Page 762: ......
Page 763: ...Revision No of sheets sheet 20 Circuit Diagram 3HAC 13347 1 Axis 2 107 01 ...
Page 764: ......
Page 765: ...Revision No of sheets sheet 20 Circuit Diagram 3HAC 13347 1 Axis 3 108 01 ...
Page 766: ......
Page 767: ...Revision No of sheets sheet 20 Circuit Diagram 3HAC 13347 1 Axis 4 109 01 ...
Page 768: ......
Page 769: ...Revision No of sheets sheet 20 Circuit Diagram 3HAC 13347 1 Axis 5 IRB 7600 110 01 ...
Page 770: ......
Page 771: ...Revision No of sheets sheet 20 Circuit Diagram 3HAC 13347 1 Axis 5 IRB 6600 110 1 01 ...
Page 772: ......
Page 773: ...Revision No of sheets sheet 20 Circuit Diagram 3HAC 13347 1 Axis 6 111 01 ...
Page 774: ......
Page 776: ......
Page 778: ......
Page 780: ......
Page 781: ...Revision No of sheets sheet 20 Circuit Diagram 3HAC 13347 1 Switches axis 1 113 01 ...
Page 782: ......
Page 783: ...Revision No of sheets sheet 20 Circuit Diagram 3HAC 13347 1 Switches Fan axis 2 114 01 ...
Page 784: ......
Page 785: ...Revision No of sheets sheet 20 Circuit Diagram 3HAC 13347 1 Switches Fan axis 3 115 01 ...
Page 786: ......
Page 787: ...Revision No of sheets sheet 20 Circuit Diagram 3HAC 13347 1 Weld connections 116 01 ...
Page 792: ...Circuit Diagram 3HAC 5582 2 Rev 03 Contents Page 4 Circuit Diagram S4Cplus ...
Page 793: ...Revision 04 No of sheets sheet 1 0 107 Circuit Diagram 3HAC 5582 2 1 General Information ...
Page 794: ......
Page 795: ...Revision 04 No of sheets sheet 1 1 91 Circuit Diagram 3HAC 5582 2 Block Diagram ...
Page 796: ......
Page 797: ...Revision 04 No of sheets sheet 1 2 91 Circuit Diagram 3HAC 5582 2 View of Control Cabinet ...
Page 798: ......
Page 799: ...Revision 04 No of sheets sheet 1 3 91 Circuit Diagram 3HAC 5582 2 View of Control Cabinet ...
Page 800: ......
Page 801: ...Revision 04 No of sheets sheet 1 4 91 Circuit Diagram 3HAC 5582 2 Designation ...
Page 802: ......
Page 803: ...Revision 04 No of sheets sheet 1 5 91 Circuit Diagram 3HAC 5582 2 Designation ...
Page 804: ......
Page 806: ......
Page 807: ...Revision 04 No of sheets sheet 2 1 107 Circuit Diagram 3HAC 5582 2 Mains Connection ...
Page 808: ......
Page 809: ...Revision 04 No of sheets sheet 2 2 107 Circuit Diagram 3HAC 5582 2 Transformer Unit 400 600V ...
Page 810: ......
Page 811: ...Revision 04 No of sheets sheet 2 3 107 Circuit Diagram 3HAC 5582 2 Transformer unit 200 440V ...
Page 812: ......
Page 813: ...Revision 04 No of sheets sheet 2 4 107 Circuit Diagram 3HAC 5582 2 Power Supply ...
Page 814: ......
Page 816: ......
Page 818: ......
Page 820: ......
Page 821: ...Revision 04 No of sheets sheet 3 1 91 Circuit Diagram 3HAC 5582 2 Block Diagram Computer Unit ...
Page 822: ......
Page 823: ...Revision 04 No of sheets sheet 3 2 91 Circuit Diagram 3HAC 5582 2 Cabling in Computer Unit ...
Page 824: ......
Page 826: ......
Page 827: ...Revision 04 No of sheets sheet 3 4 91 Circuit Diagram 3HAC 5582 2 Computer Cooling ...
Page 828: ......
Page 830: ......
Page 832: ......
Page 834: ......
Page 835: ...Revision 04 No of sheets sheet 3 8 91 Circuit Diagram 3HAC 5582 2 Base Connector Unit ...
Page 836: ......
Page 838: ......
Page 840: ......
Page 841: ...Revision 04 No of sheets sheet 4 1 107 Circuit Diagram 3HAC 5582 2 Emergency Stop ...
Page 842: ......
Page 844: ......
Page 846: ......
Page 848: ......
Page 850: ......
Page 851: ...Revision 04 No of sheets sheet 5 1 107 Circuit Diagram 3HAC 5582 2 Block Diagram ...
Page 852: ......
Page 853: ...Revision 04 No of sheets sheet 5 2 107 Circuit Diagram 3HAC 5582 2 Rectifier Fans and Bleeder ...
Page 854: ......
Page 856: ......
Page 858: ......
Page 859: ...Revision 04 No of sheets sheet 5 5 107 Circuit Diagram 3HAC 5582 2 Servo Drive Units IRB 140 ...
Page 860: ......
Page 861: ...Revision 04 No of sheets sheet 5 6 107 Circuit Diagram 3HAC 5582 2 Servo Drive Units IRB 340 ...
Page 862: ......
Page 864: ......
Page 866: ......
Page 868: ......
Page 870: ......
Page 871: ...Revision 04 No of sheets sheet 5 11 107 Circuit Diagram 3HAC 5582 2 Control Cable IRB 140 ...
Page 872: ......
Page 874: ......
Page 876: ......
Page 878: ......
Page 880: ......
Page 882: ......
Page 884: ......
Page 885: ...Revision 04 No of sheets sheet 6 0 107 Circuit Diagram 3HAC 5582 2 6 External Axes ...
Page 886: ......
Page 887: ...Revision 04 No of sheets sheet 107 6 1 Circuit Diagram 3HAC 5582 2 External Axes ...
Page 888: ......
Page 890: ......
Page 892: ......
Page 894: ......
Page 896: ......
Page 898: ......
Page 900: ......
Page 902: ......
Page 904: ......
Page 906: ......
Page 907: ...Revision 04 No of sheets sheet 107 6 11 Circuit Diagram 3HAC 5582 2 DDU Cable IRB 6600 7600 ...
Page 908: ......
Page 910: ......
Page 912: ......
Page 914: ......
Page 916: ......
Page 917: ...Revision 04 No of sheets sheet 107 7 1 Circuit Diagram 3HAC 5582 2 I O Unit Position ...
Page 918: ......
Page 920: ......
Page 922: ......
Page 924: ......
Page 926: ......
Page 928: ......
Page 929: ...Revision 04 No of sheets sheet 107 7 7 Circuit Diagram 3HAC 5582 2 Relay I O Unit Input 1 16 ...
Page 930: ......
Page 932: ......
Page 934: ......
Page 935: ...Revision 04 No of sheets sheet 107 7 10 Circuit Diagram 3HAC 5582 2 Analogue I O Unit ...
Page 936: ......
Page 938: ......
Page 939: ...Revision 04 No of sheets sheet 107 7 12 Circuit Diagram 3HAC 5582 2 Interbus S Slave ...
Page 940: ......
Page 941: ...Revision 04 No of sheets sheet 107 7 13 Circuit Diagram 3HAC 5582 2 Profibus DP Slave ...
Page 942: ......
Page 943: ...Revision 04 No of sheets sheet 107 7 14 Circuit Diagram 3HAC 5582 2 Encoder Unit ...
Page 944: ......
Page 945: ...Revision 04 No of sheets sheet 107 7 15 Circuit Diagram 3HAC 5582 2 Profibus DP Master Slave ...
Page 946: ......
Page 948: ......
Page 949: ...Revision 04 No of sheets sheet 8 0 107 Circuit Diagram 3HAC 5582 2 8 Other Options ...
Page 950: ......
Page 951: ...Revision 04 No of sheets sheet 107 8 1 Circuit Diagram 3HAC 5582 2 Floppy Disk ...
Page 952: ......
Page 953: ...Revision 04 No of sheets sheet 107 8 2 Circuit Diagram 3HAC 5582 2 Service Equipment Supply ...
Page 954: ......
Page 956: ......
Page 958: ......
Page 960: ......
Page 962: ......
Page 964: ......
Page 965: ...Revision 04 No of sheets sheet 107 8 8 Circuit Diagram 3HAC 5582 2 External Control Panel ...
Page 966: ......
Page 968: ......
Page 969: ...Revision 04 No of sheets sheet 107 8 10 Circuit Diagram 3HAC 5582 2 Time Relay ...
Page 970: ......
Page 972: ......
Page 974: ......
Page 975: ...Revision 04 No of sheets sheet 107 8 13 Circuit Diagram 3HAC 5582 2 LAN Ethernet connection ...
Page 976: ......
Page 978: ......
Page 980: ......
Page 982: ......
Page 984: ......
Page 986: ......
Page 988: ......
Page 989: ...Revision 04 No of sheets sheet 9 0 107 Circuit Diagram 3HAC 5582 2 9 External Axis Cabinet ...
Page 990: ......
Page 991: ...Revision 04 No of sheets sheet 107 9 1 Circuit Diagram 3HAC 5582 2 Block Diagram ...
Page 992: ......
Page 994: ......
Page 995: ...Revision 04 No of sheets sheet 107 9 3 Circuit Diagram 3HAC 5582 2 Designation ...
Page 996: ......
Page 997: ...Revision 04 No of sheets sheet 107 9 4 Circuit Diagram 3HAC 5582 2 Mains Connection ...
Page 998: ......
Page 999: ...Revision 04 No of sheets sheet 107 9 5 Circuit Diagram 3HAC 5582 2 Transformer Unit ...
Page 1000: ......
Page 1001: ...Revision 04 No of sheets sheet 107 9 6 Circuit Diagram 3HAC 5582 2 Power Supply I O Supply ...
Page 1002: ......
Page 1003: ...Revision 04 No of sheets sheet 107 9 7 Circuit Diagram 3HAC 5582 2 Power Unit ...
Page 1004: ......
Page 1005: ...Revision 04 No of sheets sheet 107 9 8 Circuit Diagram 3HAC 5582 2 Rectifier Fans and Bleeder ...
Page 1006: ......
Page 1008: ......
Page 1010: ......
Page 1012: ......
Page 1014: ......
Page 1016: ......
Page 1018: ......
Page 1019: ...Revision 04 No of sheets sheet 107 9 15 Circuit Diagram 3HAC 5582 2 Service Equipment Supply ...







































































