





























3.3.3.3 Lifting the robot with roundslings
Recommended lifting method
Recommended lifting method for the robot includes one of following lifting
accessories:
•
Fork lift accessory set: 3HAC058825-001. See
Lifting the robot with fork lift
•
Fork lift accessory set: 3HAC047054-003. See
Lifting the robot with fork lift
•
Lifting and turning tool: 3HAC073537-001. See
suspended mounted manipulator on page 65
The robot can also be lifted with roundslings as detailed in this section.
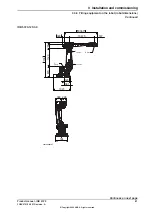
Illustration - lifting position
This figure shows the robot in its lifting and transportation position.
685 ±55
626 ±55
70°
(20°)
50°
70°
xx2100000477
Continues on next page
66
Product manual - IRB 5720
3HAC079195-001 Revision: A
© Copyright 2022 ABB. All rights reserved.
3 Installation and commissioning
3.3.3.3 Lifting the robot with roundslings
Summary of Contents for IRB 5710
Page 1: ...ROBOTICS Product manual IRB 5720 ...
Page 8: ...This page is intentionally left blank ...
Page 14: ...This page is intentionally left blank ...
Page 36: ...This page is intentionally left blank ...
Page 186: ...This page is intentionally left blank ...
Page 580: ...This page is intentionally left blank ...
Page 604: ...This page is intentionally left blank ...
Page 609: ......





















































