





























Parameters and firmware blocks
91
0…22.7 mA
Maximum AO1 output value.
15.04
AO1 MIN
(see above)
Defines the minimum value for analogue output AO1.
0…22.7 mA
Minimum AO1 output value.
15.05
AO1 MAX SCALE
(see above)
Defines the real value that corresponds to the maximum analogue output value defined by
parameter
AO1 MAX.
-32768…32767
Real value corresponding to value of parameter
15.06
AO1 MIN SCALE
(see above)
Defines the real value that corresponds to the minimum analogue output value defined by
parameter
. See parameter
-32768…32767
Real value corresponding to value of parameter
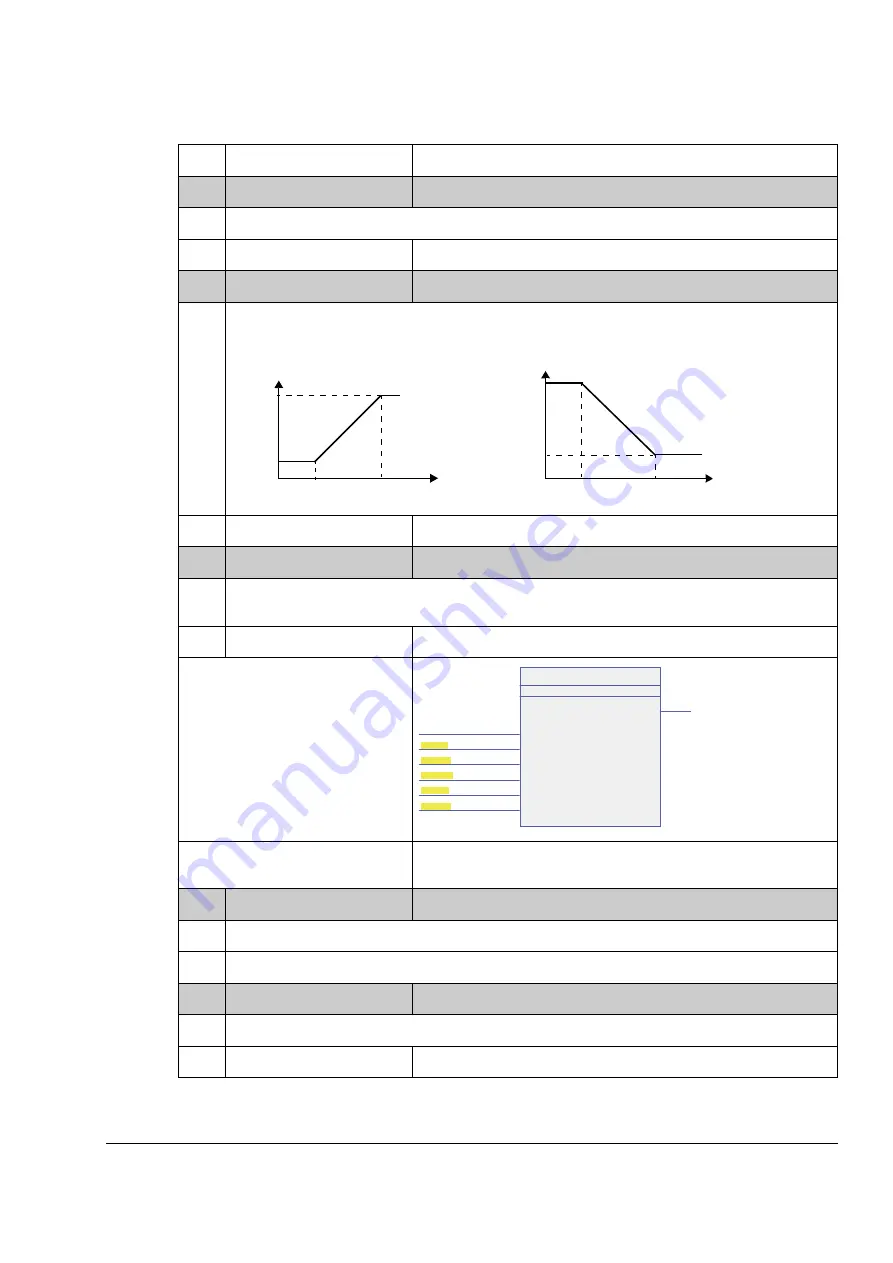
Firmware block:
AO2
(15)
Connects an actual signal to
analogue output AO2, and filters and
scales the output signal. Also shows
the value of the output.
Block outputs located in other
parameter groups
(page
)
15.07
AO2 PTR
(see above)
Selects a drive signal to be connected to analogue output AO2.
Value pointer: Group and index
15.08
AO2 FILT TIME
(see above)
Defines the filtering time constant for analogue output AO2. See parameter
.
0…30 s
Filter time constant for AO2.
AO
(real)
AO
(real)
AO
(mA)
AO
(mA)
AO2
26
TLF7 2 msec
(9)
< 15.07 AO2 PTR
[ SPEED ACT PERC ]
(1 / 1.02)
15.08 AO2 FILT TIME
[ 0.100 s ]
15.09 AO2 MAX
[ 10.000 V ]
15.10 AO2 MIN
[ -10.000 V ]
15.11 AO2 MAX SCALE
[ 100.000 ]
15.12 AO2 MIN SCALE
[ -100.000 ]
2.09 AO2
Summary of Contents for ACSM1 Series
Page 1: ...ACSM1 Firmware Manual ACSM1 Speed and Torque Control Program...
Page 2: ......
Page 4: ......
Page 12: ...Table of contents 12...
Page 49: ...Drive control and features 49...
Page 282: ...Standard function blocks 282...
Page 306: ...Application program template 306...
Page 312: ...Control chain block diagrams 312...
Page 331: ...331...
Page 332: ...332...
Page 333: ......







































































