






















Appendix B – Drive-to-drive link
326
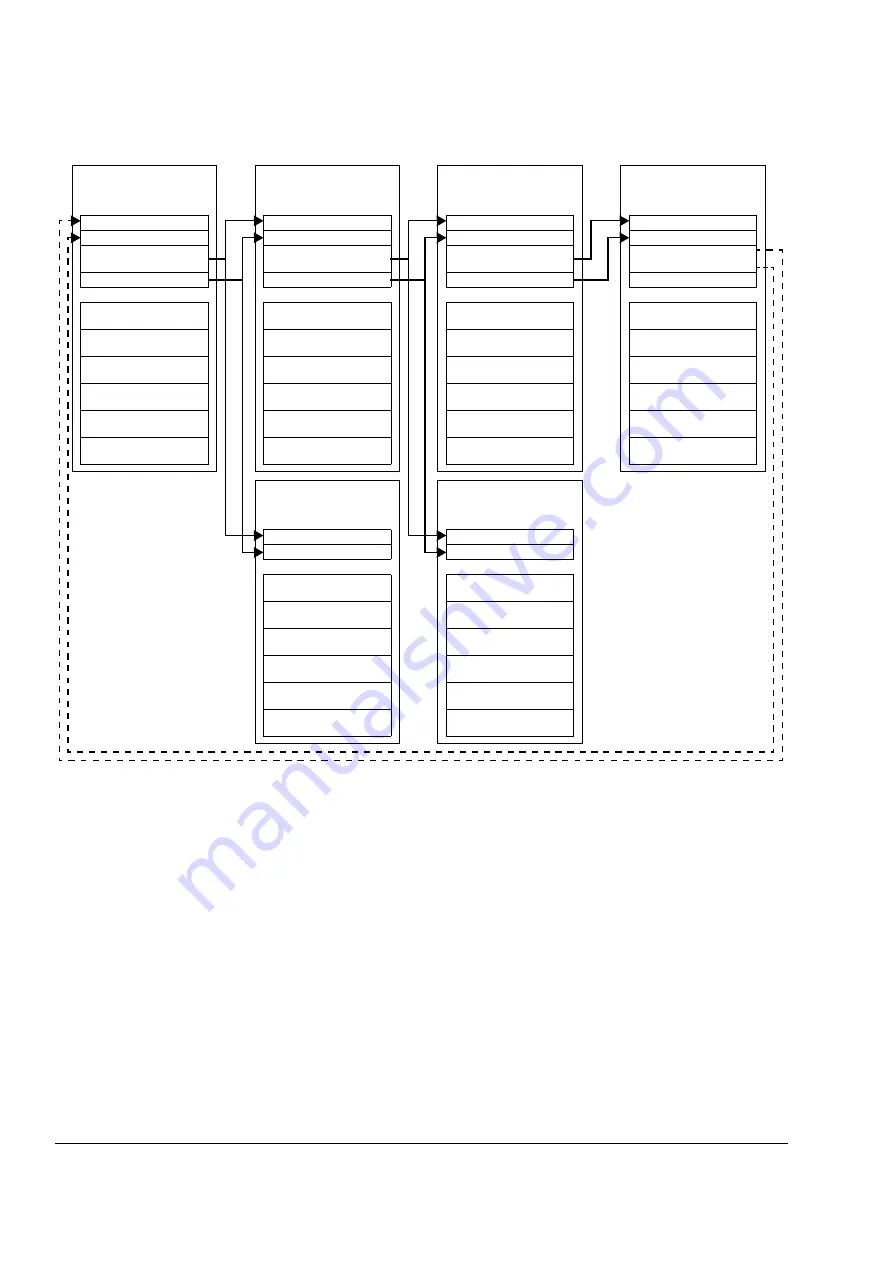
Master
(
)
)
=
don’t care
= don’t care
= 3 *
Follower
=
1
don’t care
= 2
= don’t care
Follower
(
)
)
=
2
= 2
= 4
Follower
=
3
don’t care
= 4
= don’t care
= don’t care
Follower
(
)
(
=
4
= 4
= 5
= don’t care
Follower
)
(
5
= 5
= don’t care *
= don’t care
* If the last follower should send an acknowledgement to the master, the following changes would be required: In the master drive,
par.
should be set to 4; in the last follower, par.
should be set to
and par.
to 0. Note that, at the time of printing, the acknowledgement is not used in any way.
In the example, sending the acknowledgement is prevented by setting par.
in the last
follower. Alternatively, parameters
and
could be set to non-equal values.
Summary of Contents for ACSM1 Series
Page 1: ...ACSM1 Firmware Manual ACSM1 Speed and Torque Control Program...
Page 2: ......
Page 4: ......
Page 12: ...Table of contents 12...
Page 49: ...Drive control and features 49...
Page 282: ...Standard function blocks 282...
Page 306: ...Application program template 306...
Page 312: ...Control chain block diagrams 312...
Page 331: ...331...
Page 332: ...332...
Page 333: ......







































































