
























Appendix B – Drive-to-drive link
322
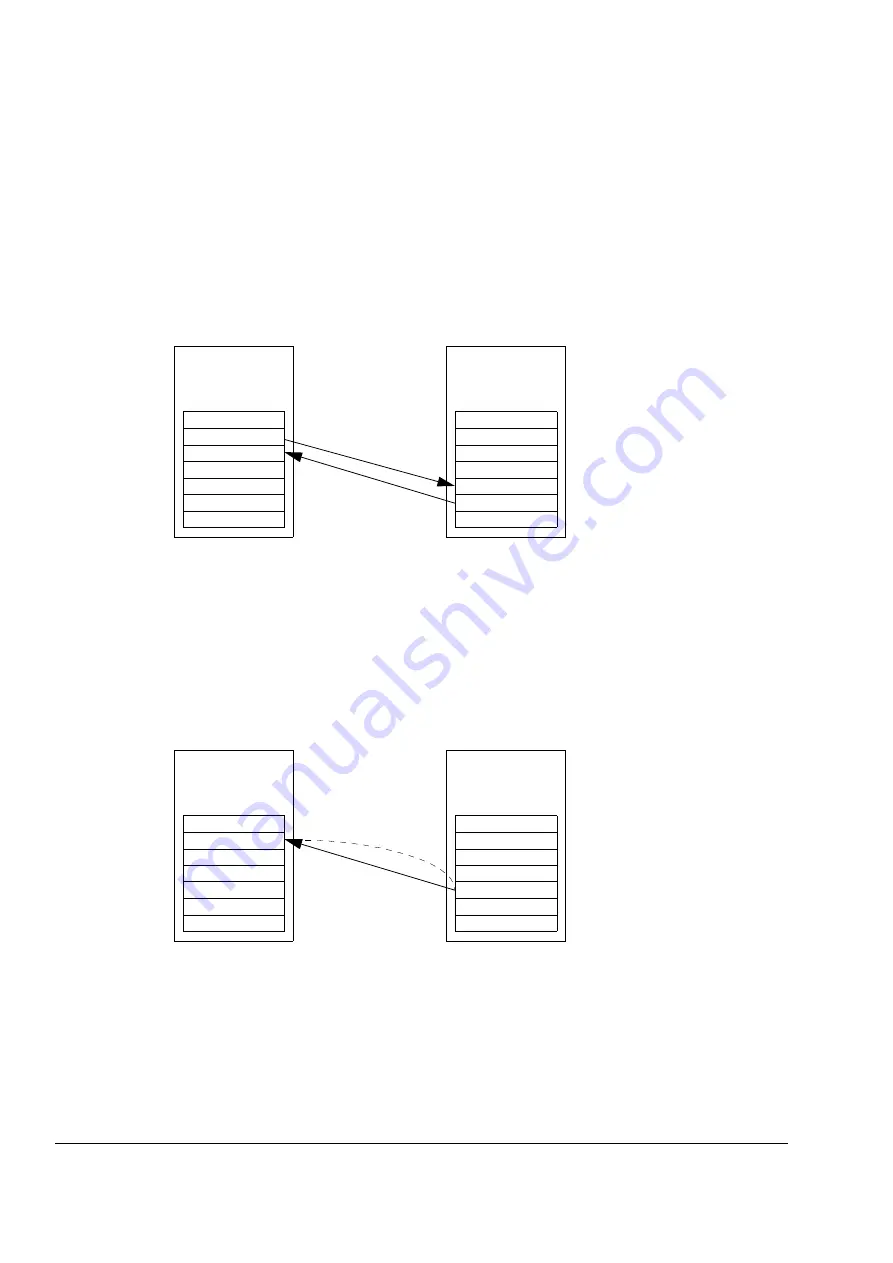
Master point-to-point messaging
In this type of messaging, the master sends one dataset (LocalDsNr) from its own
dataset table to the follower’s. TargetNode stands for the node address of the
follower; RemoteDsNr specifies the target dataset number.
The follower responds by returning the contents of the next dataset. The response is
stored into dataset Lo1 in the master.
Note:
Master point-to-point messaging is only supported at the master because the
response is always sent to node address 0 (the master).
Read remote messaging
The master can read a dataset (RemoteDsNr) from a follower specified by
TargetNode. The follower returns the contents of the requested dataset to the
master. The response is stored at dataset LocalDsNr in the master.
Note:
Read remote messaging is only supported at the master because the
response is always sent to node address 0 (the master).
Master
Dataset table
(LocalDsNr)
(Lo1)
TargetNode = X
= X
Follower
Dataset table
(RemoteDsNr)
(Rem1)
Master
Dataset table
(LocalDsNr)
TargetNode = X
= X
Follower
Dataset table
(RemoteDsNr)
Summary of Contents for ACSM1 Series
Page 1: ...ACSM1 Firmware Manual ACSM1 Speed and Torque Control Program...
Page 2: ......
Page 4: ......
Page 12: ...Table of contents 12...
Page 49: ...Drive control and features 49...
Page 282: ...Standard function blocks 282...
Page 306: ...Application program template 306...
Page 312: ...Control chain block diagrams 312...
Page 331: ...331...
Page 332: ...332...
Page 333: ......