





























Parameters and firmware blocks
119
0…10 s
Derivation time for speed controller.
28.05
DERIV FILT TIME
(see above)
Defines the derivation filter time constant.
0…1000 ms
Derivation filter time constant.
28.06
ACC COMPENSATION
(see above)
Selects the source for the acceleration compensation torque.
The default value is P.3.7, i.e signal
, which is the output of the
firmware block.
Note:
This parameter has been locked, i.e. no user setting is possible.
Value pointer: Group and index
28.07
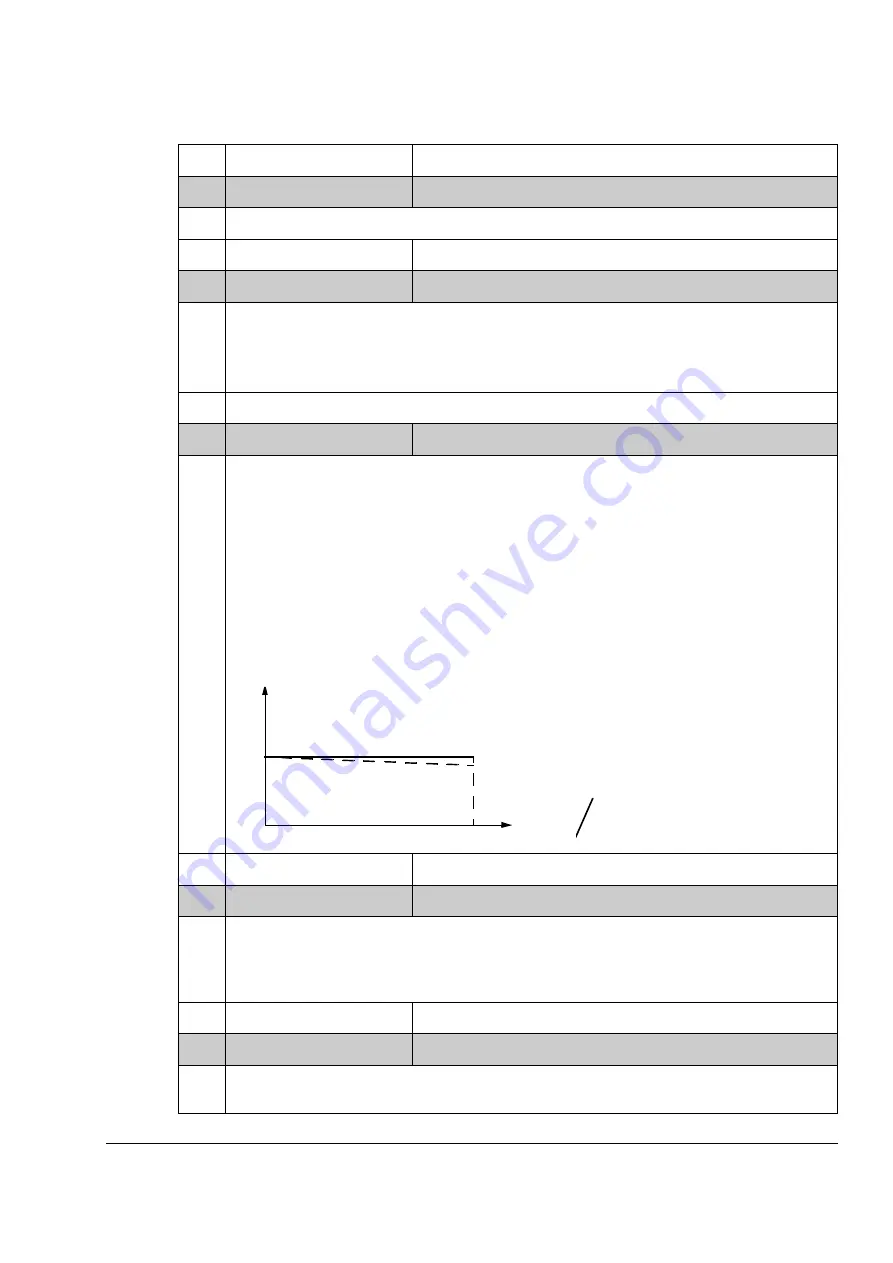
DROOPING RATE
(see above)
Defines the droop rate (in percent of the motor nominal speed). The drooping slightly decreases the
drive speed as the drive load increases. The actual speed decrease at a certain operating point
depends on the droop rate setting and the drive load (= torque reference / speed controller output). At
100% speed controller output, drooping is at its nominal level, i.e. equal to the value of this parameter.
The drooping effect decreases linearly to zero along with the decreasing load.
Drooping rate can be used e.g. to adjust the load sharing in a Master/Follower application run by
several drives. In a Master/Follower application the motor shafts are coupled to each other.
The correct droop rate for a process must be found out case by case in practice.
0…100%
Droop rate.
28.08
BAL REFERENCE
(see above)
Defines the reference used in the speed control output balancing, i.e. an external value to be forced to
the output of the speed controller. In order to guarantee smooth operation during output balancing, the
speed controller D-part is disabled and the acceleration compensation term is set to zero.
The source for the balancing enable signal is selected by parameter
-1600…1600%
Speed control output balancing reference.
28.09
SPEEDCTRL BAL EN
(see above)
Selects the source for the speed control output balancing enable signal. See parameter
. 1 = Enabled. 0 = Disabled.
Drive
load
Speed controller
output / %
Motor speed (% of nominal)
100%
Speed decrease =
Speed controller output · Drooping · Max. speed
Example:
Speed controller output is 50%, drooping rate is 1%, maximum speed of the drive is 1500 rpm.
Speed decrease = 0.50 · 0.01 · 1500 rpm = 7.5 rpm.
100%
}
No drooping
Drooping
Summary of Contents for ACSM1 Series
Page 1: ...ACSM1 Firmware Manual ACSM1 Speed and Torque Control Program...
Page 2: ......
Page 4: ......
Page 12: ...Table of contents 12...
Page 49: ...Drive control and features 49...
Page 282: ...Standard function blocks 282...
Page 306: ...Application program template 306...
Page 312: ...Control chain block diagrams 312...
Page 331: ...331...
Page 332: ...332...
Page 333: ......







































































