





























Parameters and firmware blocks
116
Group
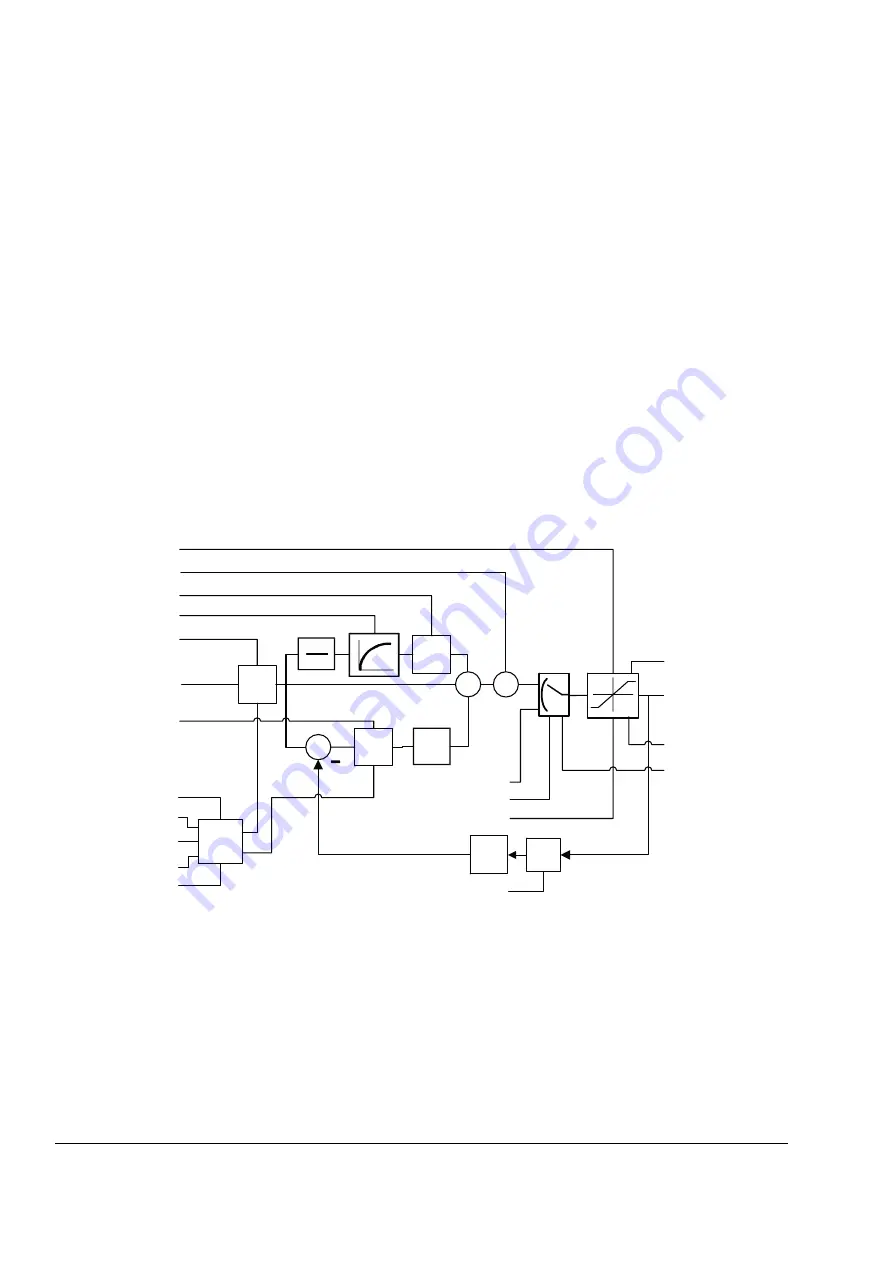
Speed controller settings such as
• selection of source for speed error
• adjustment of PID-type speed controller variables
• limitation of speed controller output torque
• selection of source for acceleration compensation torque
• forcing an external value to the output of the speed controller (with the balancing
function).
• adjustment of the load sharing in a Master/Follower application run by several
drives (the drooping function).
The speed controller includes an anti-windup function (i.e. I-term is frozen during
torque reference limitation).
In torque control mode, the speed controller output is frozen.
For manual speed controller tuning, see section
Manual speed controller tuning
on
page
3.07 ACC COMP TORQ
K
p
T
i
T
d
K
p
28.04 DERIVATION TIME
28.05 DERIV FILT TIME
28.02 PROPORT GAIN
28.07 DROOPING RATE
28.08 BAL REFERENCE
28.03 INTEGRATION TIME
3.08 TORQ REF SP CTRL
28.11 MAX TORQ SP CTRL
28.10 MIN TORQ SP CTRL
28.09 SPEEDCTRL BAL EN
+
+
+
d
dt
³
dt
x
28.14 P GAIN ADPT COEF
28.15 I TIME ADPT COEF
28.12 PI ADAPT MAX SPD
28.13 PI ADAPT MIN SPD
1.01 SPEED ACT
F(x)
06.05 LIMIT WORD 1
bit 1 SPD CTL TLIM MIN
06.05 LIMIT WORD 1
bit 2 SPD CTL TLIM MAX
06.05 SPEED CTRL STAT
bit 4 BAL ACTIVE
3.06 SPEED ERROR FILT
Summary of Contents for ACSM1 Series
Page 1: ...ACSM1 Firmware Manual ACSM1 Speed and Torque Control Program...
Page 2: ......
Page 4: ......
Page 12: ...Table of contents 12...
Page 49: ...Drive control and features 49...
Page 282: ...Standard function blocks 282...
Page 306: ...Application program template 306...
Page 312: ...Control chain block diagrams 312...
Page 331: ...331...
Page 332: ...332...
Page 333: ......







































































