











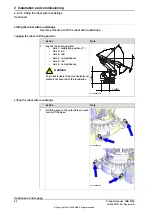














Lifting the robot with roundslings
Use this procedure to lift the robot with roundslings.
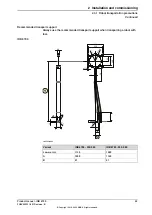
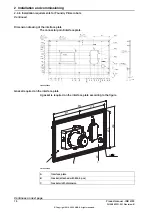
Jogging the robot to lifting position
Note
Action
45°
(20°)
65°
70°
890
50
570
55
xx1300000356
Jog the robot into position:
•
Axis 1: calibration position (0°)
•
Axis 2: -45°
•
Axis 3: +65°
•
Axis 4: no significance
•
Axis 5: +70°
•
Axis 6: no significance
WARNING
The robot is likely to be mechanically un-
stable if not secured to the foundation.
1
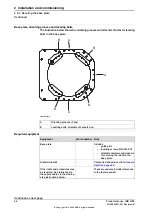
Lifting the robot with roundslings
Note
Action
xx1200001301
Fit lifting eyes to the outer holes on each
corner of the base.
1
xx1200001302
Continues on next page
62
Product manual - IRB 6790
3HAC063331-001 Revision: B
© Copyright 2019 - 2020 ABB. All rights reserved.
2 Installation and commissioning
2.4.4.2 Lifting the robot with roundslings
Continued
Summary of Contents for IRB 6790
Page 1: ...ROBOTICS Product manual IRB 6790 ...
Page 8: ...This page is intentionally left blank ...
Page 16: ...This page is intentionally left blank ...
Page 38: ...This page is intentionally left blank ...
Page 164: ...This page is intentionally left blank ...
Page 612: ...This page is intentionally left blank ...
Page 638: ...This page is intentionally left blank ...
Page 644: ...This page is intentionally left blank ...
Page 658: ...This page is intentionally left blank ...
Page 660: ...This page is intentionally left blank ...
Page 667: ......