
























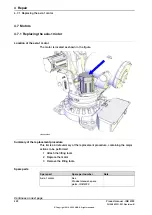





4.6.4 Unloading the balancing device
Prerequisite
This section describes how to unload the balancing device using the Hydraulic
press tool, balancing device: 3HAC020902-001.
DANGER
If the balancing device is fitted on the robot during the procedure, remember to:
•
jog axis-2 to calibration position
•
lock axis-2 with a M16 lock screw. How to secure the lower arm is described
in the current repair activity, for example removal of the balancing device.
DANGER
There is a high tensioned spring inside the balancing device, incorrect handling
may cause injuries and damage property.
Continues on next page
Product manual - IRB 6790
411
3HAC063331-001 Revision: B
© Copyright 2019 - 2020 ABB. All rights reserved.
4 Repair
4.6.4 Unloading the balancing device
Summary of Contents for IRB 6790
Page 1: ...ROBOTICS Product manual IRB 6790 ...
Page 8: ...This page is intentionally left blank ...
Page 16: ...This page is intentionally left blank ...
Page 38: ...This page is intentionally left blank ...
Page 164: ...This page is intentionally left blank ...
Page 612: ...This page is intentionally left blank ...
Page 638: ...This page is intentionally left blank ...
Page 644: ...This page is intentionally left blank ...
Page 658: ...This page is intentionally left blank ...
Page 660: ...This page is intentionally left blank ...
Page 667: ......