Siemens SIMOTION D4x5-2, Operating Instructions Manual
The Siemens SIMOTION D4x5-2 boasts a seamless integration of motion control and automation functions. Unlock the potential of this state-of-the-art product with its detailed Operating Instructions Manual, available for download absolutely free. Visit manualshive.com to access this comprehensive manual and maximize your SIMOTION D4x5-2 experience.
Share
Download

















Reviews:
No comments
Related manuals for SIMOTION D4x5-2
4
Brand: J D Squared Pages: 18
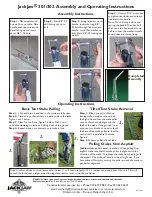
301
Brand: JackJaw Pages: 2
3
Brand: JD Squared Pages: 15
CT160
Brand: jcb Pages: 166
CT160
Brand: jcb Pages: 41

F1
Brand: Saferoad Pages: 24

Slope 1
Brand: Modulate Pages: 2

2290
Brand: Bandit Pages: 136

Genius
Brand: Facsimile Pages: 16

Grid
Brand: Tate Pages: 5

Grid
Brand: Tate Pages: 7

BH6
Brand: Bahco Pages: 9

LOUDEN 200 Series
Brand: ACCO Brands Pages: 144
ABS-Lock DH04 Series
Brand: ABS Pages: 4

320
Brand: Vahva Jussi Pages: 9

13STKH
Brand: Barreto Pages: 18

295
Brand: BARKO LOADERS Pages: 85
AR
Brand: Wacker Neuson Pages: 62





















































